Rigid Body
 Rigid body enables simulation of physical bodies in accordance with Rigid body dynamics. This type of body is the most commonly used and the most efficient one in terms of performance.Rigid物体可以根据Rigid物体动态.这种类型的车身是最常用的,在性能方面也是最有效的。
Rigid body enables simulation of physical bodies in accordance with Rigid body dynamics. This type of body is the most commonly used and the most efficient one in terms of performance.Rigid物体可以根据Rigid物体动态.这种类型的车身是最常用的,在性能方面也是最有效的。

See also也可以看看#
Assigning a Rigid Body指定刚体#
To assign the Rigid body to an object via UnigineEditor perform the following steps:通过将 Rigid物体分配给对象统一编辑器执行以下步骤:
- 打开 World Hierarchy 窗口。
- 选择要为其分配 Rigid物体的对象。
-
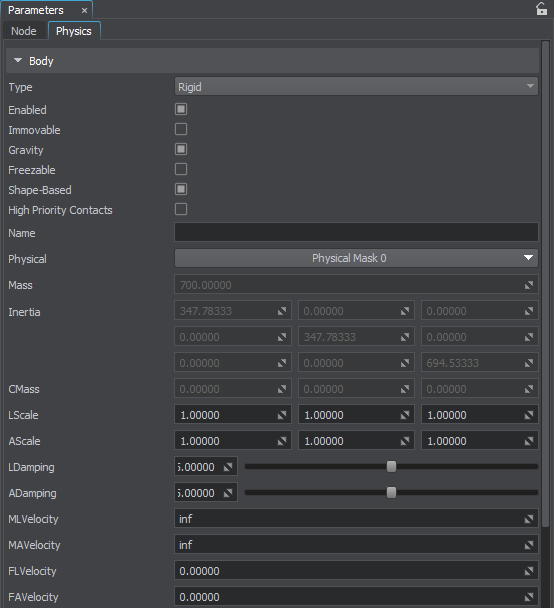
Go to the Physics tab in the Parameters window and assign a physical body to the selected object by selecting Body -> Rigid.转到 Parameters 窗口中的 Physics 选项卡并分配一个物理物体通过选择 Body -> Rigid 到选定的对象。

- Set the body name and change other parameters, if necessary.如有必要,设置物体名称并更改其他参数。
Parameters参数#
The set of Rigid body parameters in accordance with Rigid body dynamics includes the following:一个Rigid物体的参数集按照Rigid物体动态包括以下内容:
| Immovable |
|
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Freezable |
注意
This flag is recommended to be always set for all rigid bodies except for Player Actor. Freezing a player causes it to react to the user's input with a time lag, small but nonetheless perceptible.建议始终为除 Player Actor 之外的所有刚体设置 Freezable 标志。冻结玩家会导致它对用户的输入做出反应,时滞很小,但仍然可以察觉。 |
||||||||||||||||||
| Shape-Based |
注意
Setting the individual masses or densities of the shapes is the most intuitive method to achieve correct physical behavior of the body. Even if overridden by the body parameters, they are still used to determine the distribution of mass within the object.设置形状的各个质量或密度是实现物体正确物理行为的最直观方法。即使被覆盖通过物体参数,它们仍然用于确定物体内的质量分布。 |
||||||||||||||||||
| Inertia |
注意
To rotate the body evenly about the rotation axis, the matrix should be diagonal, i.e all values outside the main diagonal are set to 0. Otherwise, the body may start to rotate chaotically.要绕旋转轴均匀地旋转物体,矩阵应该是对角的,即主对角线之外的所有值都设置为 0。否则,物体可能会开始混乱地旋转。
Different inertia tensors that override shape-based parameters覆盖基于形状的参数的不同惯性张量 |
||||||||||||||||||
| CMass |
注意
Center of mass is set as coordinates of the point in local space of the body.质心设置为该点在物体局部空间中的坐标。 |

本页面上的信息适用于 UNIGINE 2.20 SDK.