Obstacles
An obstacle is an invisible object which is placed inside a navigation area and is bypassed during pathfinding.
The obstacles can be added to the scene:
- As a single node to indicate an area or a node that should be avoided during pathfinding. However, if you change transformation of the node, the obstacle transformation won't change.
- As a child node of a node that should be bypassed. In this case, transformation of the obstacle will change together with the node transformation and a route will always be calculated correctly.
There are 3 types of the obstacles:
-
 Obstacle Box is a cuboid-shaped obstacle.
Obstacle Box is a cuboid-shaped obstacle. -
 Obstacle Sphere is a sphere-shaped obstacle.
Obstacle Sphere is a sphere-shaped obstacle. -
 Obstacle Capsule is a capsule-shaped obstacle.
Obstacle Capsule is a capsule-shaped obstacle.
You should choose the most appropriate type depending on the form of the node that should be bypassed during pathfinding.
Usage Example#
Supposing, you need to add a node that changes its transformation each frame and should be bypassed during pathfinding. In this case, you should do the following:
-
Place the required node inside the navigation area within which routes will be calculated.
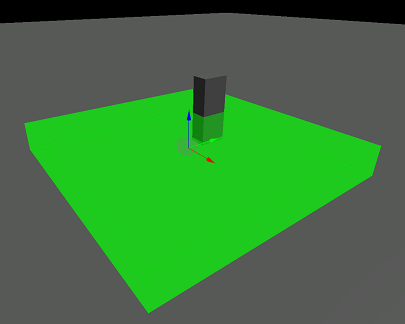 A cuboid-shaped ObjectMeshDynamic node placed inside the Navigation Sector
A cuboid-shaped ObjectMeshDynamic node placed inside the Navigation Sector - Add the obstacle of the required type to the scene and combine its position with the node's position.
-
Set the required size for the obstacle.
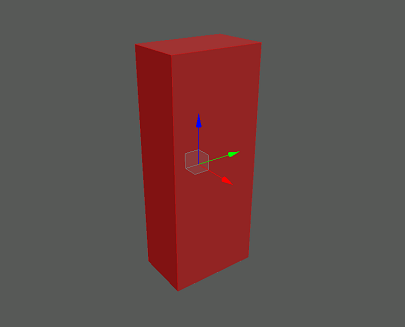 The obstacle box and the node.
The obstacle box and the node. -
In the World Hierarchy window, drag the obstacle node to make it a child of the required node.
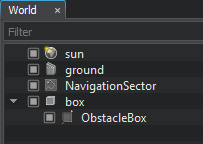 NoticeThis will enable to simultaneously change transformation of the node and the obstacle. You can also perform it via code.
NoticeThis will enable to simultaneously change transformation of the node and the obstacle. You can also perform it via code. - Now you can create a route from the script. The route will be automatically recalculated when the node transformation changes.
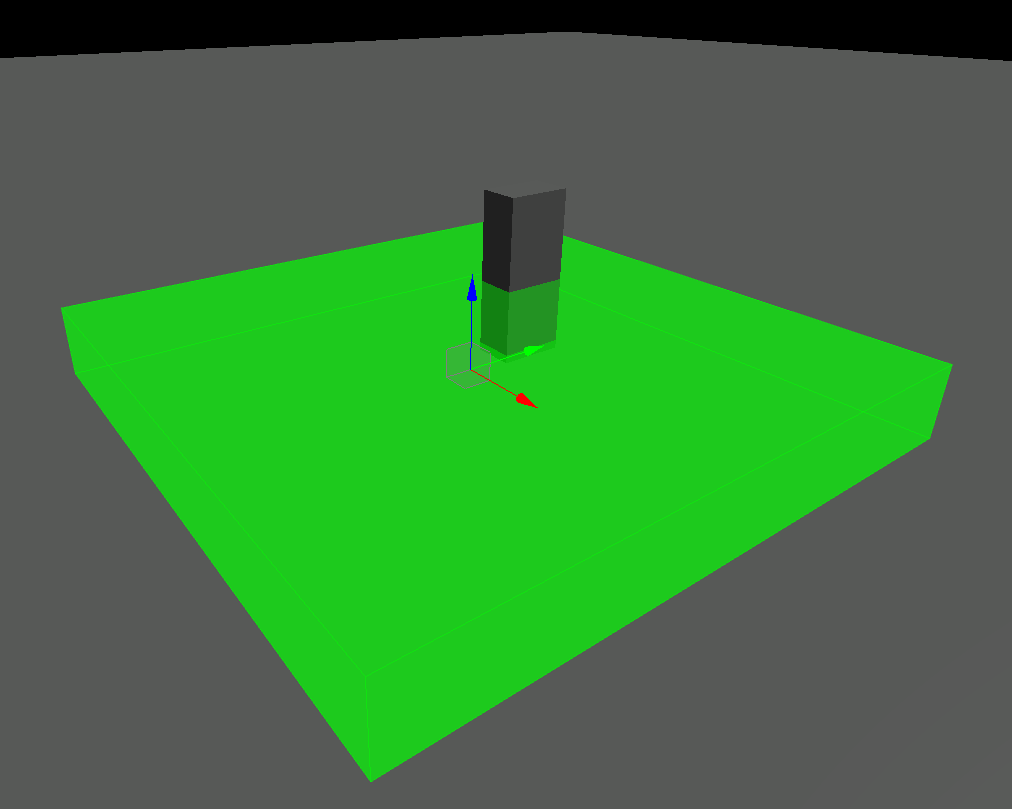
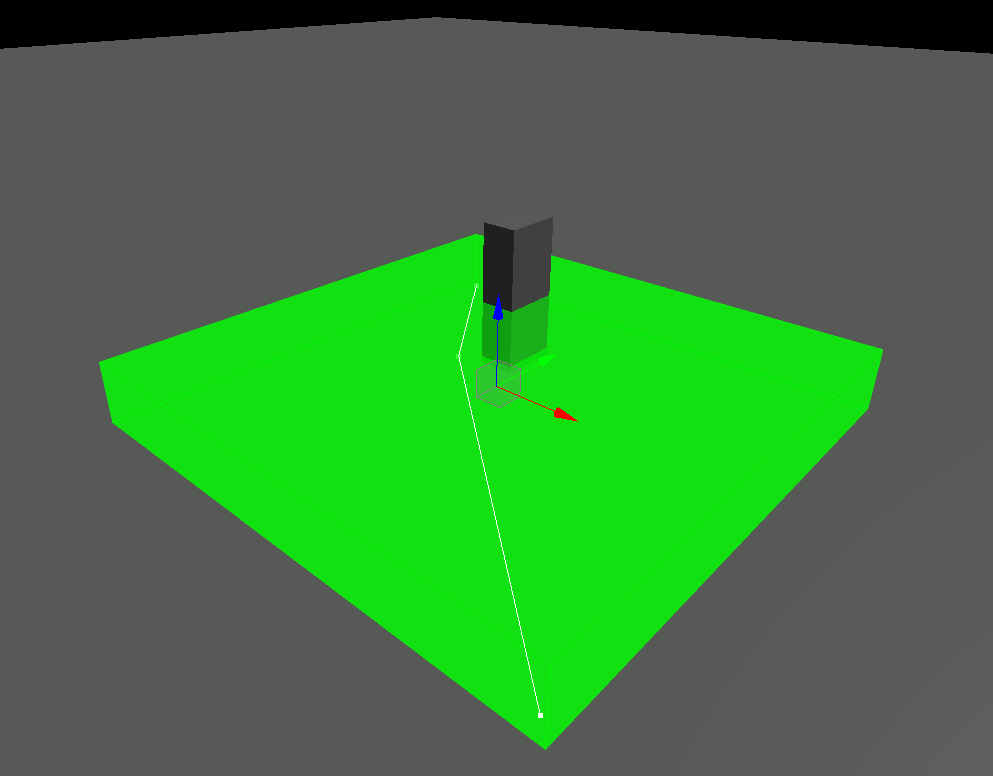
In the result, the route will be calculated as follows (the route is highlighted with white):
See Also#
- The example on Creating a Route within Navigation Area with Obstacles via code.