JointWheel Class
Warning
The scope of applications for UnigineScript is limited to implementing materials-related logic (material expressions, scriptable materials, brush materials). Do not use UnigineScript as a language for application logic, please consider C#/C++ instead, as these APIs are the preferred ones. Availability of new Engine features in UnigineScript (beyond its scope of applications) is not guaranteed, as the current level of support assumes only fixing critical issues.
| Inherits from: | Joint |
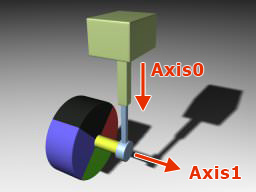
This class is used to create ray-cast wheels. Both a frame and a wheel are rigid bodies. There is no need to assign a shape to the wheel: ray casting is used to detect collision of the wheel with a surface.
Example#
The following code illustrates connection of two rigid bodies (frame and wheel) using a wheel joint.
Source code (UnigineScript)
JointWheel joint = class_remove(new JointWheel(frame, wheel));
// setting joint anchor coordinates
joint.setWorldAnchor(wheel.getObject().getWorldTransform() * Vec3_zero);
// setting joint axes coordinates
joint.setWorldAxis0(vec3(0.0f,0.0f,1.0f));
joint.setWorldAxis1(vec3(0.0f,1.0f,0.0f));
// setting linear damping and spring rigidity
joint.setLinearDamping(200.0f);
joint.setLinearSpring(100.0f);
// setting lower and upper suspension ride limits [-1.0; 0.0]
joint.setLinearLimitFrom(-1.0f);
joint.setLinearLimitTo(0.0f);
// setting target suspension height
joint.setLinearDistance(0.5f);
// setting maximum angular velocity and torque
joint.setAngularVelocity(-20.0f);
joint.setAngularTorque(10.0f);
// setting wheel parameters
joint.setWheelRadius(0.5f);
joint.setWheelMass(4.0f);
joint.setWheelThreshold(0.1f);
// setting tyre friction parameters
joint.setTangentFriction(4.0f);
joint.setBinormalFriction(5.0f);
// setting number of iterations
joint.setNumIterations(8);See Also#
- Creating a Car with Wheel Joints usage example.
- UnigineScript API sample <UnigineSDK>/data/samples/joints/wheel_00
- UnigineScript API sample <UnigineSDK>/data/samples/physics/car_02
JointWheel Class
Members
static JointWheel ( ) #
Constructor. Creates a wheel joint with an anchor at the origin of the world coordinates.static JointWheel ( Body body0, Body body1 ) #
Constructor. Creates a wheel joint connecting two given bodies. An anchor is placed between centers of mass of the bodies.Arguments
- Body body0 - Frame to be connected with the joint.
- Body body1 - Wheel to be connected with the joint.
static JointWheel ( Body body0, Body body1, Vec3 anchor, vec3 axis0, vec3 axis1 ) #
Constructor. Creates a wheel joint connecting two given bodies with specified suspension and spindle axis coordinates and an anchor placed at specified coordinates.Arguments
- Body body0 - Frame to be connected with the joint.
- Body body1 - Wheel to be connected with the joint.
- Vec3 anchor - Anchor coordinates.
- vec3 axis0 - Suspension axis coordinates.
- vec3 axis1 - Wheel spindle axis coordinates.
void setAngularDamping ( float damping ) #
Sets an angular damping of the joint (wheel rotation damping).Arguments
- float damping - Angular damping. If a negative value is provided, 0 will be used instead.
float getAngularDamping ( ) #
Returns the angular damping of the joint (wheel rotation damping).Return value
Angular damping.void setAngularTorque ( float torque ) #
Sets a maximum torque of the attached angular motor.Arguments
- float torque - Maximum torque. If a negative value is provided, 0 will be used instead.
float getAngularTorque ( ) #
Returns the maximum torque of the attached angular motor.Return value
Maximum torque.void setAngularVelocity ( float velocity ) #
Sets a maximum velocity of wheel rotation.Arguments
- float velocity - Velocity in radians per second.
float getAngularVelocity ( ) #
Returns the target velocity of wheel rotation.Return value
Target velocity in radians per second.void setAxis00 ( vec3 axis00 ) #
Sets coordinates of suspension axis, along which a wheel moves vertically. This is a shock absorber.Arguments
- vec3 axis00 - Suspension axis.
vec3 getAxis00 ( ) #
Returns suspension axis coordinates.Return value
Suspension axis.void setAxis10 ( vec3 axis10 ) #
Sets a wheel spindle axis in coordinates of the frame (body 0): an axis around which a wheel rotates when moving forward (or backward).
Arguments
- vec3 axis10 - Wheel spindle axis in coordinates of the frame (body 0).
vec3 getAxis10 ( ) #
Returns the wheel spindle axis in coordinates of the frame (body 0).
Return value
Wheel spindle axis in coordinates of the frame (body 0).void setAxis11 ( vec3 axis11 ) #
Sets a wheel spindle axis in coordinates of the wheel (body 1): an axis around which a wheel rotates when steering.
Arguments
- vec3 axis11 - Wheel spindle axis in coordinates of the wheel (body 1).
vec3 getAxis11 ( ) #
Returns the wheel spindle in coordinates of the wheel (body 1).
Return value
Wheel spindle axis in coordinates of the wheel (body 1).void setBinormalAngle ( float angle ) #
Sets a coefficient specifying how fast the optimal lateral force can be achieved. The larger this value, the more is the impulse produced by the tire.Arguments
- float angle - Coefficient characterizing the tire lateral impulse. If a negative value is provided, 0 will be used instead.
float getBinormalAngle ( ) #
Returns the coefficient specifying how fast the optimal lateral force can be achieved. The larger this value, the more is the impulse produced by the tire.Return value
Coefficient characterizing the tire lateral impulse.void setBinormalFriction ( float friction ) #
Sets a lateral (sideways) friction of the tire.Arguments
- float friction - Lateral friction. If a negative value is provided, 0 will be used instead.
float getBinormalFriction ( ) #
Returns the lateral (sideways) friction of the tire.Return value
Lateral friction.vec3 getContactNormal ( ) #
Returns a normal of a point of contact with the ground, in world coordinates.Return value
Normal.Object getContactObject ( ) #
Returns an object representing the ground.Return value
Ground object.Vec3 getContactPoint ( ) #
Returns a point of contact with the ground, in world coordinates.Return value
Point coordinates.Shape getContactShape ( ) #
Returns a shape of the object representing the ground.Return value
Shape of the ground object.int getContactSurface ( ) #
Returns a surface of a ground object, which is in contact.Return value
Surface number.void setCurrentAngularVelocity ( float velocity ) #
Sets the rotation velocity for the attached wheels. For example, it allows to reset it to zero and stop the car when necessary.Arguments
- float velocity - Angular velocity in radians per second.
float getCurrentAngularVelocity ( ) #
Returns the current rotation velocity of the attached wheels.Return value
Current angular velocity in radians per second.void setCurrentLinearDistance ( float distance ) #
Sets suspension compression (i.e. the length of the suspension).Arguments
- float distance - Suspension length in units.
float getCurrentLinearDistance ( ) #
Returns the current suspension compression (i.e. the length of the suspension).Return value
Current suspension length in units.float getCurrentSlipAngle ( ) #
Returns the current angle between the wheel direction and the frame direction.Return value
Current slip angle in degrees.float getCurrentSlipRatio ( ) #
Returns the current ratio of wheel spin to ground speed.Return value
Current slip ratio in percents. 0 means that the velocities are equal. If the throttle is pressed, the value will be positive. If the brake is pressed, the value will be negative.void setPhysicsIntersectionMask ( int mask ) #
Sets a physics intersection mask for the joint.Arguments
- int mask - Integer, each bit of which is a mask.
int getPhysicsIntersectionMask ( ) #
Returns an physics intersection mask mask of the joint.Return value
Integer, each bit of which is a mask.void setLinearDamping ( float damping ) #
Sets a linear damping of the suspension.Arguments
- float damping - Linear damping. If a negative value is provided, 0 will be used instead.
float getLinearDamping ( ) #
Returns the linear damping of the suspension.Return value
Linear damping.void setLinearDistance ( float distance ) #
Sets a target height of the suspension.Arguments
- float distance - Height in units.
float getLinearDistance ( ) #
Returns the target height of the suspension.Return value
Target height in units.void setLinearLimitFrom ( float from ) #
Sets a low limit of the suspension ride.Arguments
- float from - Limit in units.
float getLinearLimitFrom ( ) #
Returns the low limit of the suspension ride.Return value
Low limit in units.void setLinearLimitTo ( float to ) #
Sets a high limit of the suspension ride.Arguments
- float to - Limit in units.
float getLinearLimitTo ( ) #
Returns the high limit of the suspension ride.Return value
High limit in units.void setLinearSpring ( float spring ) #
Sets a rigidity coefficient of the suspension.Arguments
- float spring - Rigidity coefficient. If a negative value is provided, 0 will be used instead.
float getLinearSpring ( ) #
Returns the rigidity coefficient of the suspension.Return value
Rigidity coefficient.void setTangentAngle ( float angle ) #
Sets a coefficient specifying how fast the optimal longitudinal force can be achieved. The larger this value, the more is the impulse produced by the tire.Arguments
- float angle - Coefficient characterizing the tire longitudinal impulse. If a negative value is provided, 0 will be used instead.
float getTangentAngle ( ) #
Returns the coefficient specifying how fast the optimal longitudinal force can be achieved. The larger this value, the more is the impulse produced by the tire.Return value
Coefficient characterizing the tire longitudinal impulse.void setTangentFriction ( float friction ) #
Sets a longitudinal (forward) friction of the tire.Arguments
- float friction - Longitudinal friction. If a negative value is provided, 0 will be used instead.
float getTangentFriction ( ) #
Returns the longitudinal (forward) friction of the tire.Return value
Longitudinal friction.void setWheelMass ( float mass ) #
Sets a mass of the attached wheel.Notice
If g (Earth's gravity) equals to 9.8 m/s
2, and 1 unit equals to 1 m, the mass is measured in kilograms.
Arguments
- float mass - Mass of the wheel. If a negative value is provided, 0 will be used instead.
float getWheelMass ( ) #
Returns the mass of the attached wheel.Notice
If g (Earth's gravity) equals to 9.8 m/s
2, and 1 unit equals to 1 m, the mass is measured in kilograms.
Return value
Mass of the wheel.void setWheelRadius ( float radius ) #
Sets a radius of the attached wheel.Arguments
- float radius - Radius of the wheel in units. If a negative value is provided, 0 will be used instead.
float getWheelRadius ( ) #
Returns the radius of the attached wheel.Return value
Radius of the wheel in units.void setWheelThreshold ( float threshold ) #
Sets a threshold difference between the wheel and ground velocities. When it is too small, the longitudinal force will be scaled down to prevent unnatural vibrations.Arguments
- float threshold - Difference threshold. If a negative value is provided, 0 will be used instead.
float getWheelThreshold ( ) #
Returns the threshold difference between the wheel and ground velocities. When it is too small, the longitudinal force will be scaled down to prevent unnatural vibrations.Return value
Difference threshold.void setWorldAxis0 ( vec3 axis0 ) #
Sets suspension axis in the world coordinates.Arguments
- vec3 axis0 - Suspension axis in the world coordinates.
vec3 getWorldAxis0 ( ) #
Returns the suspension axis in the world coordinates.Return value
Suspension axis in the world coordinates.void setWorldAxis1 ( vec3 axis1 ) #
Sets a wheel spindle axis in the world coordinates.Arguments
- vec3 axis1 - Wheel spindle axis in the world coordinates.
vec3 getWorldAxis1 ( ) #
Returns the wheel spindle axis in the world coordinates.Return value
Wheel spindle axis in the world coordinates.Last update:
2021-12-13
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)