Коллизионные формы (Shapes)
 While a body simulates various types of physical behavior, a shape represents the volume of space occupied by a physical body. A physically simulated object usually has one body and one or several shapes which allow objects to collide with each other (therefore, shapes are often referred as collision shapes). Objects with shapes also fall under gravity, bounce off static surfaces or slide along them. A body without a single shape assigned behaves as a dummy body that can be connected to other bodies using joints, but does not collide and is immune to gravity.В то время как тело (body) имитирует различные типы физического поведения, форма (shape) представляет собой объем пространства, занимаемого физическим телом. Физически моделируемый объект обычно имеет одно тело и одну или несколько форм, которые позволяют объектам сталкиваться друг с другом (поэтому формы часто называют коллизионными формами). Объекты с формой также падают под действием силы тяжести, отскакивают от статичных поверхностей или скользят по ним. Тело, которому не назначена единственная форма, ведет себя как фиктивное тело Dummy, которое может соединяться с другими телами с помощью сочленений, но не сталкивается и невосприимчиво к гравитации.
While a body simulates various types of physical behavior, a shape represents the volume of space occupied by a physical body. A physically simulated object usually has one body and one or several shapes which allow objects to collide with each other (therefore, shapes are often referred as collision shapes). Objects with shapes also fall under gravity, bounce off static surfaces or slide along them. A body without a single shape assigned behaves as a dummy body that can be connected to other bodies using joints, but does not collide and is immune to gravity.В то время как тело (body) имитирует различные типы физического поведения, форма (shape) представляет собой объем пространства, занимаемого физическим телом. Физически моделируемый объект обычно имеет одно тело и одну или несколько форм, которые позволяют объектам сталкиваться друг с другом (поэтому формы часто называют коллизионными формами). Объекты с формой также падают под действием силы тяжести, отскакивают от статичных поверхностей или скользят по ним. Тело, которому не назначена единственная форма, ведет себя как фиктивное тело Dummy, которое может соединяться с другими телами с помощью сочленений, но не сталкивается и невосприимчиво к гравитации.
The maximum number of collision shapes for one body is limited to 32768.Максимальное количество коллизионных форм для одного тела - 32768.Basic shape types are as follows:Основные типы форм следующие:
- Simple primitives. They are very fast and memory efficient. Simple primitives should be used whenever possible.
- Sphere (uses continuous collision detection) Sphere (uses continuous collision detection)
- Capsule (uses continuous collision detection) Capsule (uses continuous collision detection)
- Cylinder Cylinder
- Box Box
- Sphere (uses continuous collision detection)Сфера (использует непрерывное обнаружение столкновений)
- Capsule (uses continuous collision detection)Капсула (использует непрерывное обнаружение столкновений)
- Cylinder Цилиндр
- Box Куб
- Complex collision shapes composed of triangles. These shapes are slower and more memory demanding.
- Convex hullConvex hull
- A set of autogenerated convex hullsA set of autogenerated convex hulls
- Convex hullВыпуклый многогранник
- A set of autogenerated convex hullsНабор автоматически сгенерированных выпуклых многогранников
Simple primitives make collision calculations easier while keeping performance high and accuracy acceptable. Convex hulls provide higher precision, however, continuous collision detection is not available for this type of shape. Therefore, convex hulls should not be used for fast-moving objects.Простые примитивы упрощают вычисление столкновений, сохраняя при этом высокую производительность и приемлемую точность. Выпуклые многогранники обеспечивают более высокую точность, однако непрерывное обнаружение столкновений недоступно для этого типа формы. Следовательно, выпуклые многогранники не стоит использовать для быстро движущихся объектов.
A shape doesn't have to duplicate the mesh it approximates. It is recommended to use simple primitives. Even though they are not precise, in the majority of cases they provide acceptable results.The number of shapes should be kept as low as possible. Otherwise, heavy physics calculations will decrease the performance. Форма не должна дублировать меш, который она аппроксимирует. Рекомендуется использовать простые примитивы. Несмотря на то, что они неточны, в большинстве случаев они обеспечивают приемлемые результаты.
Число форм должно быть как можно меньше. В противном случае тяжелые физические вычисления снизят производительность.
A shape cannot be created without a body and does not have its own position in world coordinates. It is always assigned to a body and positioned relative to it.Форма (shape) не может быть создана без тела (body) и не имеет собственной позиции в мировых координатах. Она всегда присваивается телу и позиционируется относительно него.
See alsoДополнительная информация#
Programming implementation:Программная реализация:
- Класс Shape
- Класс ShapeSphere
- Класс ShapeCapsule
- Класс ShapeCylinder
- Класс ShapeBox
- Класс ShapeConvex
- A fragment of video tutorial on physics illustrating the concept of shape.Фрагмент видеоурока по физике, иллюстрирующий концепцию формы.
Shape ParametersПараметры формы#
All shapes regardless of their type have the following common parametersВсе формы независимо от их типа имеют следующие общие параметры:

| Enabled | A flag indicating if a shape is enabled.Флаг, указывающий, включена ли форма. |
| Continuous | A flag indicating if the continuous collision detection is enabled for the shape. Примечание Continuous collision detection is available for sphere and capsule shapes only.Флаг, указывающий, включено ли непрерывное обнаружение столкновений для формы.Continuous collision detection is available for sphere and capsule shapes only.Continuous collision detection is available for sphere and capsule shapes only.Примечание Continuous collision detection is available for sphere and capsule shapes only.Непрерывное обнаружение столкновений доступно только для сфер и капсул. |
| Mass | Mass of the shape. Changing the mass influences the density, which is calculated by dividing the mass by shape volume. In case if there are several shapes assigned to a body (e.g. a set of convex hulls)Масса формы. Изменение массы влияет на плотность, которая рассчитывается путем деления массы на объем формы. В случае, если телу присвоено несколько форм (например, набор выпуклых многогранников) |
| Density | Density of the shape. Changing the density influences the mass, which is calculated by multiplying shape volume by density.Плотность формы. Изменение плотности влияет на массу, которая рассчитывается путем умножения объема формы на плотность. |
| Friction | Coefficient of friction of the shape. Defines how rough the shape's surface is. The higher the value, the less tendency the shape has to slide.
Примечание
In case if an object contains a surface and a shape, both with specified friction parameter, only the shape's parameter will be used.Коэффициент трения формы. Определяет шероховатость поверхности формы. Чем выше значение, тем меньше тенденция к скольжению формы.
Примечание
In case if an object contains a surface and a shape, both with specified friction parameter, only the shape's parameter will be used.В случае, если объект содержит поверхность и форму, и для них обеих задан параметр трения, будет использоваться только параметр формы. |
| Restitution | Coefficient of restitution of the shape. Defines how bouncy the shape is when colliding.
Примечание
The minimum value of 0 indicates inelastic collisions (a piece of soft clay hitting the floor)The maximum value of 1 represents highly elastic collisions (a rubber ball bouncing off a wall)In case if an object contains a surface and a shape, both with specified restitution parameter, only the shape's parameter will be used.Коэффициент восстановления формы. Определяет упругость формы при столкновении.
Примечание
In case if an object contains a surface and a shape, both with specified restitution parameter, only the shape's parameter will be used.В случае, если объект содержит поверхность и форму, и для них обеих задан параметр восстановления, будет использоваться только параметр формы. |
| Position | Position of the shape in the coordinates of the body.Положение формы в координатах тела (body). |
| Rotation | Rotation of the shape in the coordinates of the body.Вращение формы в координатах тела (body). |
| Physics Intersection mask | Physics Intersection bit mask of the shape.Битовая маска формы для определения Physics Intersection. |
| Collision mask | Collision bit mask of the shape. This mask is used to specify collisions of the shape with other ones.Битовая маска столкновений формы. Эта маска используется для указания столкновений формы с другими. |
| Exclusion mask | Exclusion bit mask of the shape. This mask is used to prevent collisions of the shape with other ones.Битовая маска исключений формы. Эта маска используется для предотвращения столкновения формы с другими. |
Our video tutorial on physics contains an overview of the
shape parameters and clarification on how to use the Exclusion and Collision masks.Наш видеоурок по физике содержит обзор
параметров формы и разъяснения по использованию масок Exclusion и Collision.
Adding a ShapeДобавление формы#
To add a shape via UnigineEditor, perform the following steps:Чтобы добавить форму через UnigineEditor, выполните следующие шаги:
- Open the World Hierarchy windowОткройте окно World Hierarchy
- Select an object you want to assign a physical shape to.Выберите объект, которому вы хотите присвоить физическую форму.
- Go to the Physics tab in the Parameters window and assign a physical body to the selected object: a rigid body, ragdoll body or a dummy body.
Перейдите на вкладку Physics в окне Parameters и назначьте физическое тело выбранному объекту: твердое тело (rigid), Ragdoll-тело или тело-пустышка (dummy).
- In the Shapes section below choose an appropriate type of shape and click Add.
В разделе Shapes ниже выберите подходящий тип формы и щелкните Add.
- Set necessary shape parameters.Установите необходимые параметры формы.
You can enable visualization of shapes by checking Helpers panel → Physics item → Shapes option (Visualizer should be enabled).Вы можете включить визуализацию форм, выбрав в панели Helpers → элемент Physics → параметр Shapes (Visualizer должен быть включен).
SphereСфера#
A sphere is the simplest and the fastest shape, as it has only one parameter: a radius. Continuous collision detection is available for spherical shapes. Therefore, passing through other objects even when moving at a high speed is avoided.Сфера — самая простая и быстрая форма, поскольку у нее только один параметр: радиус. Для сферических форм доступно постоянное обнаружение столкновений. Следовательно, прохождения через другие объекты даже при движении с высокой скоростью не произойдет.
Using the spherical shape for any arbitrary mesh ensures that its collisions will always be detected.Использование сферической формы для любого произвольного меша гарантирует, что столкновения с ним всегда будут обнаруживаться.

For a shape to fit your object, you can adjust the Radius of the sphere.Чтобы форма соответствовала вашему объекту, вы можете настроить Радиус сферы.

CapsuleКапсула#
A capsule is also a very fast collision shape with continuous collision detection available. Capsules are convenient for approximation of elongated objects (pillars, etc.) as well as humanoid characters, because it allows them to go up and down the stairs smoothly, without stumbling at each step (if the steps are not too high). It also ensures that character's limb will not get stuck somewhere unexpectedly.Капсула также представляет собой форму для очень быстрого расчета столкновения с возможностью непрерывного обнаружения столкновения. Капсулы удобны для аппроксимации удлиненных предметов (колонн и т.д.), А также человекообразных персонажей, поскольку позволяют им плавно подниматься и спускаться по лестнице, не спотыкаясь на каждой ступеньке (если ступеньки не слишком высокие). Это также гарантирует, что конечность персонажа не застрянет где-нибудь неожиданно.

For a shape to fit your object, you can adjust the Radius and the Height of the capsule.Чтобы форма соответствовала вашему объекту, вы можете настроить радиус и высоту капсулы.

CylinderЦилиндр#
A cylinder can be used to approximate elongated shapes with flat ends (e.g. a shafts, pylons, etc.). It is similar to a box shape.Цилиндр можно использовать для приближения удлиненных форм с плоскими концами (например, валов, опор и т. д.). Он похож на форму коробки.

For a shape to fit your object, you can adjust the Radius and the Height of the cylinder.Чтобы форма соответствовала вашему объекту, вы можете отрегулировать радиус и высоту цилиндра.

BoxКуб#
A box is a cuboid shape which can be used for approximation of volume of various objects. it is suitable for walls, doors, stairs, parts of mechanisms, car bodies, and many other things. The length of a box shape in each dimension can be chosen arbitrarily.Куб можно использовать для аппроксимации объема различных объектов. подходит для отделки стен, дверей, лестниц, деталей механизмов, кузовов автомобилей и многого другого. Измерения формы куба можно выбрать произвольно.

For a shape to fit your object, you can adjust the size of the box along each axis: Size X, Size Y, Size Y.Чтобы форма соответствовала вашему объекту, вы можете отрегулировать размер поля по каждой оси: Size X, Size Y, Size Y.

Convex HullВыпуклый многогранник (Convex hull)#
Convex hull is the slowest of all shapes and is used for objects having complex geometry. The created shape will always be convex, that is, holes and cavities of the mesh are ignored when generating a convex hull. Instead, they are included into the shape volume. Convex shape is the smallest shape that can enclose vertices of the approximated mesh.Convex hull — самая медленная из всех форм и используется для объектов сложной геометрии. Созданная форма всегда будет выпуклой, то есть отверстия и полости меша игнорируются при создании выпуклого многогранника. Вместо этого они включены в объем формы. Выпуклая форма — это наименьшая форма, которая может охватывать вершины аппроксимированного меша.

To generate a convex hull specify an approximation error value:Для создания выпуклого многогранника укажите значение ошибки аппроксимации:

The Approximation error parameter makes it possible to reduce the number of vertices of the created shape. Simple and rough convex hulls with small number of vertices are processed faster, therefore, it is recommended to keep the number of vertices as low as possible.Параметр Approximation error позволяет уменьшить количество вершин создаваемой формы. Простые и грубые выпуклые многогранники с небольшим количеством вершин обрабатываются быстрее, поэтому рекомендуется сохранять количество вершин как можно меньшим.
- By the value of 0, the shape precisely duplicates the mesh; the whole volume of it is enclosed. При значении 0 форма точно дублирует меш; весь его объем прилагается.
- The higher the value, the less vertices there are in the created shape, but the more details are skipped.Чем выше значение, тем меньше вершин в созданной форме, но тем больше деталей пропускается.
 Approximation error = 0Ошибка аппроксимации = 0
Approximation error = 0Ошибка аппроксимации = 0 |
|
 Approximation error = 0.1Ошибка аппроксимации = 0,1
Approximation error = 0.1Ошибка аппроксимации = 0,1 |
AutogeneratedАвтогенерируемая форма#
To approximate a complex concave object and exclude cavities from its volume, use a set of autogenerated convex hulls.Чтобы аппроксимировать сложный вогнутый объект и исключить полости из его объема, используйте набор автоматически сгенерированных выпуклых многогранников.
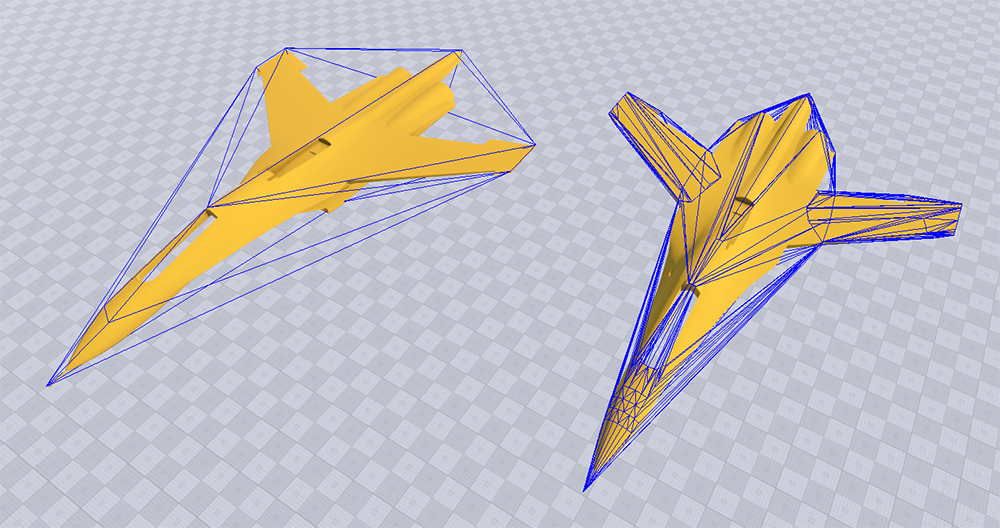
A complex concave object approximated by a single convex hull (left) and an autogenerated set of convex hulls (right)Сложный вогнутый объект, аппроксимированный единственным выпуклым многогранником (слева) и автоматически сгенерированным набором выпуклых многогранников (справа)To add an autogenerated set of shapes specify the following parameters:Чтобы добавить автоматически сгенерированный набор форм, укажите следующие параметры:

Recursion depth determines the degree of mesh decomposition. If 0 or a negative value is provided, only one shape will be created. The higher the value, the more convex shapes are to be generatedRecursion depth определяет степень декомпозиции меша. Если указан 0 или отрицательное значение, будет создана только одна форма. Чем выше значение, тем больше выпуклых форм будет создано
Approximation error makes it possible to reduce the number of vertices of generated shapes. Simple and rough convex hulls with small number of vertices are processed faster, therefore, it is recommended to keep the number of vertices as low as possible.Approximation error позволяет уменьшить количество вершин генерируемых форм. Простые и грубые выпуклые многогранники с небольшим количеством вершин обрабатываются быстрее, поэтому рекомендуется сохранять количество вершин как можно меньшим.
- By the value of 0, the shape precisely duplicates the mesh; the whole volume of it is enclosed. При значении 0 форма точно дублирует меш; весь его объем прилагается.
- The higher the value, the less vertices there are in the created shape, but the more details are skipped.Чем выше значение, тем меньше вершин в созданной форме, но тем больше деталей пропускается.
Merging threshold determines the volume threshold for merging convex shapes after decomposition and can be used to reduce the number of generated shapes: the higher the value, the less convex shapes are to be generated.Merging threshold определяет порог объема для слияния выпуклых форм после декомпозиции и может использоваться для уменьшения количества генерируемых форм: чем выше значение, тем меньше выпуклых форм будут создано.