Physics
BodyCallbacks#
Demonstrating the usage of Frozen, Position, and Contact callbacks of the Body class via C++ API.
SDK Path: <SDK_INSTALLATION>source\samples\Api\Physics\BodyCallbacks
JointCallbacks#
Demonstrating the usage of the Broken callback of the Joint class via C++ API.
SDK Path: <SDK_INSTALLATION>source\samples\Api\Physics\JointCallbacks
CraneRope#
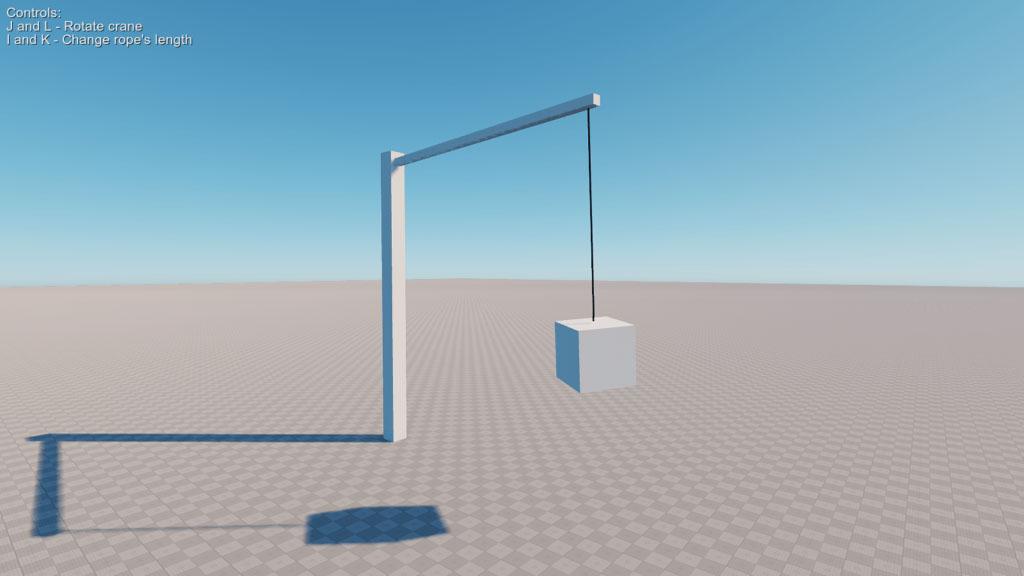
Rope physics can be extremely difficult. The sample features a simple and elegant way of creating a winch or hoist using a combination of dynamically added JointBall and geometry. This type of winch is suitable for simulation of helicopter operations or heavy duty equipment towing. The rope is implemented as a C++ component that you can use in your project.
SDK Path: <SDK_INSTALLATION>source\samples\Api\Physics\CraneRope
The information on this page is valid for UNIGINE 2.19.1 SDK.