Complex Solutions

Non-physical Tracks sample shows how to simulate the vehicle tracks using elements without physical bodies and shapes assigned. It illustrates how non-physical tracks interact with various obstacles.
SDK Path: <SDK_INSTALLATION>demos\cpp_samples_2.19.1\source\tracked_vehicle
Physical Tracks sample shows how to simulate the vehicle tracks using elements with physical bodies and shapes and suspension joints assigned. It illustrates how physical tracks behave on interacting with various obstacles and when rotating depending on the vehicle speed.
SDK Path: <SDK_INSTALLATION>demos\cpp_samples_2.19.1\source\tracked_vehicle
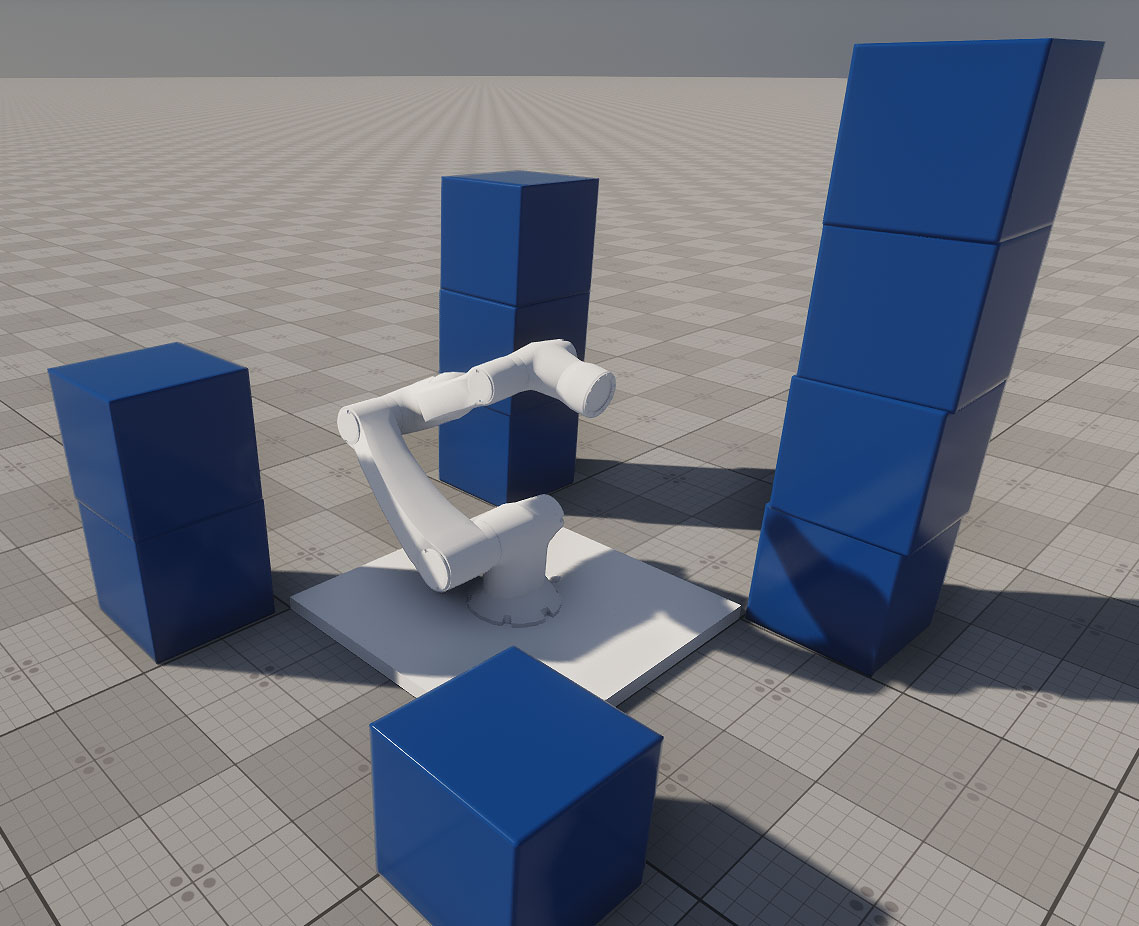
Robot Arm sample demonstrates how to create a physics-based robot arm with a kinematic chain including 6 links (1 fixed and 5 movable) connected via hinge joints (JointHinge). Each joint has a motor with its rotation controlled via a pair of keys. The end effector is a magnetic gripper that enables you to pick up, handle, and drop objects surrounding the arm. You can use this sample as a template to create any type of robotic arm with the required number of degrees of freedom for any use case, and connect a control system instead of keyboard inputs to manipulate the arm.
SDK Path: <SDK_INSTALLATION>demos\cpp_samples_2.19.1\source\robot_arm
Accessing Demo Source Code#
You can study and modify the source code of this demo to create your own projects. To access the source code do the following:
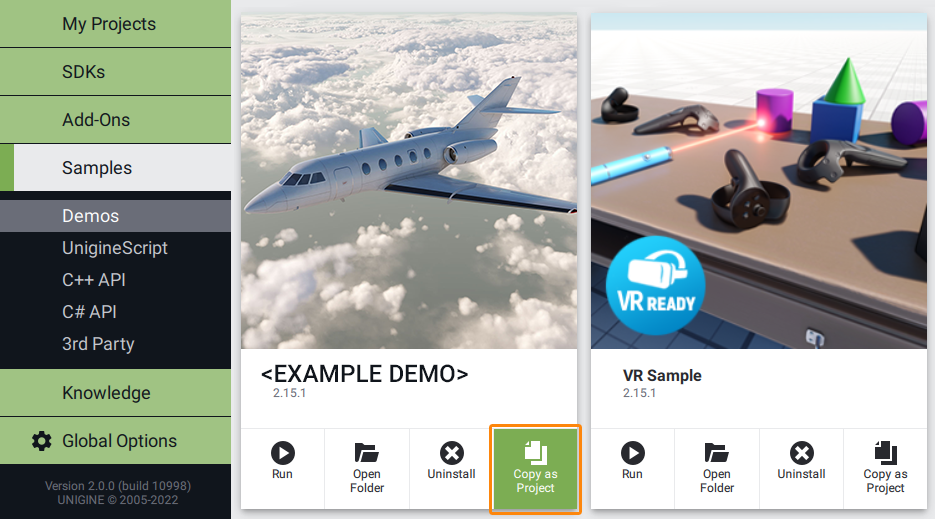
- Find the C++ Samples demo in the Demos section and click Install (if you haven't installed it yet).
- After successful installation the demo will appear in the Installed section, and you can click Copy as Project to create a project based on this demo.
- In the Create New Project window, that opens, enter the name for your new project in the corresponding field and click Create New Project.
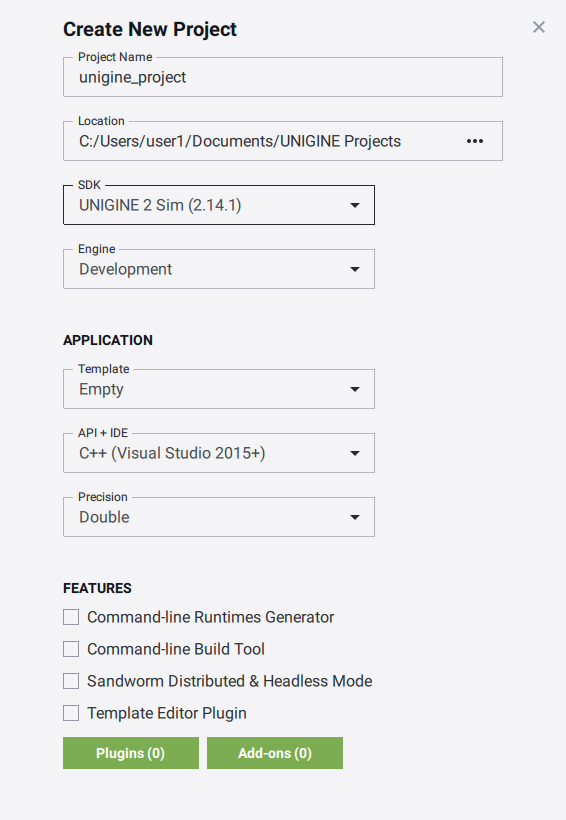
- Now you can click Open Code IDE to check and modify source code in your default IDE, or click Open Editor to open the project in the UnigineEditor.

The information on this page is valid for UNIGINE 2.19.1 SDK.