Drone Simulator
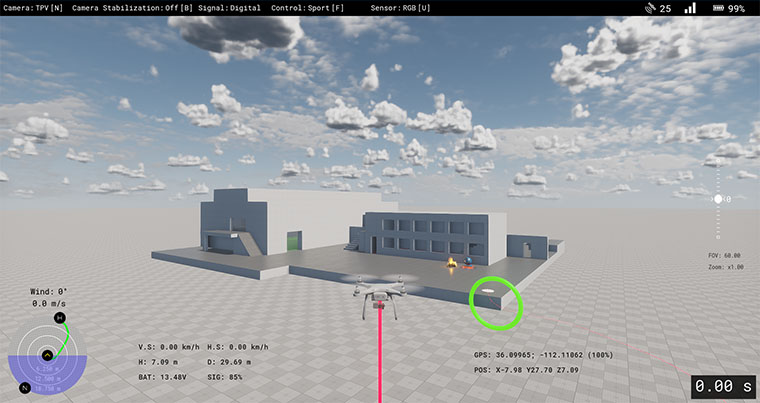




The Drone Simulator demo showcases the ability to render UAV imagery on UNIGINE in both desktop and VR modes, while also offering gamepad control over the drone. The demo uses a primitive physical flight model that provides an immersive flight experience. Additionally, it offers various camera modes to simulate different POVs, connection types, and sensors.
Features#
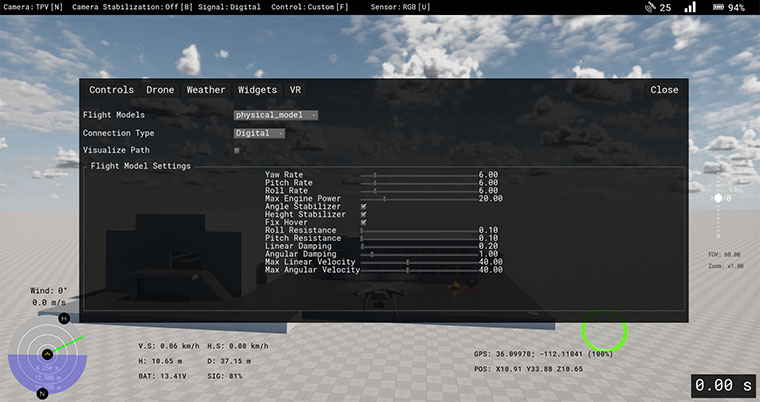
- Two flight models: linear (simple movements, physics is not applied) and physical (basic physics is implemented for drone movements)
- Two POVs (first and third person) and camera modes (fixed/balanced)
- Three control modes: cinematic, sport, and custom
- Imitation of two connection types: digital and analog (with signal interference)
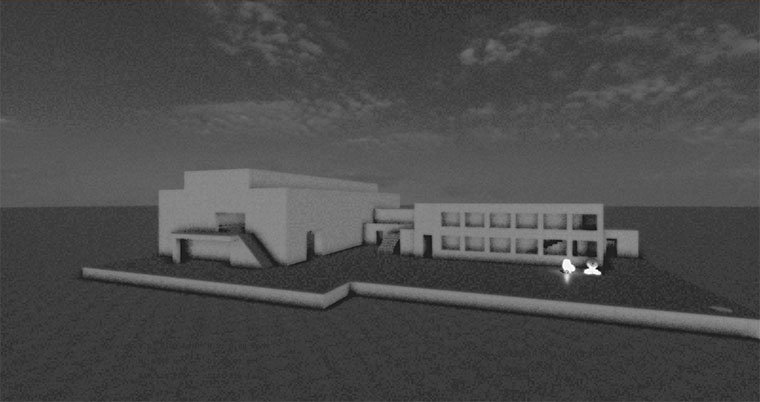
- Night vision and thermal vision effects
- Signal Lost effect with losing control and image quality deterioration
- Zooming
- Simulation of the indicator for the GPS signal with a number of satellites
- Simulation of the signal strength indicator with the bars filled depending on the distance from Drone Base Station
- Minimap with horizon and flight track indication
- Weather effects such as clouds height and density, wind (which affects the drone physical model), fog, day time, and rain
SDK Path: <SDK_INSTALLATION>demos\drone3d_demo_2.19
Accessing Demo Source Code#
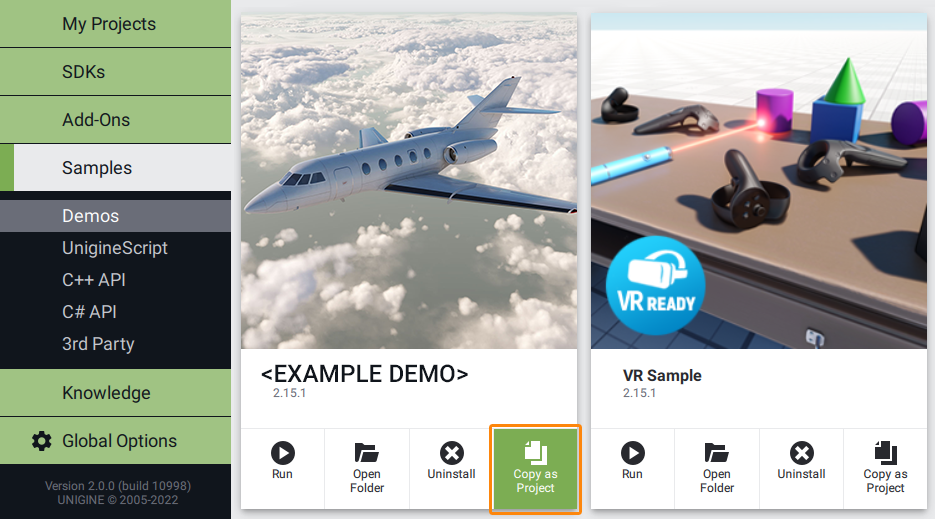
You can study and modify the source code of this demo to create your own projects. To access the source code do the following:
- Find the Drone Simulator demo in the Demos section and click Install (if you haven't installed it yet).
- After successful installation the demo will appear in the Installed section, and you can click Copy as Project to create a project based on this demo.
- In the Create New Project window, that opens, enter the name for your new project in the corresponding field and click Create New Project.
- Now you can click Open Code IDE to check and modify source code in your default IDE, or click Open Editor to open the project in the UnigineEditor.

The information on this page is valid for UNIGINE 2.19 SDK.
Last update:
2024-08-16
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)