MathCommon Functions
MathCommon Class
Enums
AXIS#
| Name | 说明/描 述 |
|---|---|
| X = = 0 | Positive X axis. |
| Y = = 1 | Positive Y axis. |
| Z = = 2 | Positive Z axis. |
| NX = = 3 | Negative X axis. |
| NY = = 4 | Negative Y axis. |
| NZ = = 5 | Negative Z axis. |
Members
float ToFloat ( string v ) #
Converts the current value to a float value.Arguments
- string v - A string value to be converted.
Return value
Resulting float value.float ToFloat ( decimal v ) #
Converts the current value to a float value.Arguments
- decimal v - A decimal value to be converted.
Return value
Resulting float value.float ToFloat ( double v ) #
Converts the current value to a float value.Arguments
- double v - A double value to be converted.
Return value
Resulting float value.float ToFloat ( int v ) #
Converts the current value to a float value.Arguments
- int v - A int value to be converted.
Return value
Resulting float value.float ToFloat ( uint v ) #
Converts the current value to a float value.Arguments
- uint v - A uint value to be converted.
Return value
Resulting float value.float ToFloat ( short v ) #
Converts the current value to a float value.Arguments
- short v - A short value to be converted.
Return value
Resulting float value.float ToFloat ( ushort v ) #
Converts the current value to a float value.Arguments
- ushort v - A ushort value to be converted.
Return value
Resulting float value.float ToFloat ( long v ) #
Converts the current value to a float value.Arguments
- long v - A long value to be converted.
Return value
Resulting float value.float ToFloat ( ulong v ) #
Converts the current value to a float value.Arguments
- ulong v - A ulong value to be converted.
Return value
Resulting float value.float ToFloat ( byte v ) #
Converts the current value to a float value.Arguments
- byte v - A byte value to be converted.
Return value
Resulting float value.float ToFloat ( sbyte v ) #
Converts the current value to a float value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Resulting float value.float ToFloat ( bool v ) #
Converts the current value to a float value.Arguments
- bool v - Vector multiplier.
Return value
Resulting float value.double ToDouble ( string v ) #
Converts the argument's value to a double value.Arguments
- string v - A string value to be converted.
Return value
Resulting double value.double ToDouble ( float v ) #
Converts the argument's value to a double value.Arguments
- float v - A float value to be converted.
Return value
Resulting double value.double ToDouble ( decimal v ) #
Converts the argument's value to a double value.Arguments
- decimal v - A decimal value to be converted.
Return value
Resulting double value.double ToDouble ( int v ) #
Converts the argument's value to a double value.Arguments
- int v - A int value to be converted.
Return value
Resulting double value.double ToDouble ( uint v ) #
Converts the argument's value to a double value.Arguments
- uint v - A uint value to be converted.
Return value
Resulting double value.double ToDouble ( short v ) #
Converts the argument's value to a double value.Arguments
- short v - A short value to be converted.
Return value
Resulting double value.double ToDouble ( ushort v ) #
Converts the argument's value to a double value.Arguments
- ushort v - A ushort value to be converted.
Return value
Resulting double value.double ToDouble ( long v ) #
Converts the argument's value to a double value.Arguments
- long v - A long value to be converted.
Return value
Resulting double value.double ToDouble ( ulong v ) #
Converts the argument's value to a double value.Arguments
- ulong v - A ulong value to be converted.
Return value
Resulting double value.double ToDouble ( byte v ) #
Converts the argument's value to a double value.Arguments
- byte v - A byte value to be converted.
Return value
Resulting double value.double ToDouble ( sbyte v ) #
Converts the argument's value to a double value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Resulting double value.double ToDouble ( bool v ) #
Converts the argument's value to a double value.Arguments
- bool v - Vector multiplier.
Return value
Resulting double value.int ToInt ( string v ) #
Converts the argument's value to an integer value.Arguments
- string v - A string value to be converted.
Return value
Resulting int value.int ToInt ( float v ) #
Converts the argument's value to an integer value.Arguments
- float v - A float value to be converted.
Return value
Resulting int value.int ToInt ( decimal v ) #
Converts the argument's value to an integer value.Arguments
- decimal v - A decimal value to be converted.
Return value
Resulting int value.int ToInt ( double v ) #
Converts the argument's value to an integer value.Arguments
- double v - A double value to be converted.
Return value
Resulting int value.int ToInt ( uint v ) #
Converts the argument's value to an integer value.Arguments
- uint v - A uint value to be converted.
Return value
Resulting int value.int ToInt ( short v ) #
Converts the argument's value to an integer value.Arguments
- short v - A short value to be converted.
Return value
Resulting int value.int ToInt ( ushort v ) #
Converts the argument's value to an integer value.Arguments
- ushort v - A ushort value to be converted.
Return value
Resulting int value.int ToInt ( long v ) #
Converts the argument's value to an integer value.Arguments
- long v - A long value to be converted.
Return value
Resulting int value.int ToInt ( ulong v ) #
Converts the argument's value to an integer value.Arguments
- ulong v - A ulong value to be converted.
Return value
Resulting int value.int ToInt ( byte v ) #
Converts the argument's value to an integer value.Arguments
- byte v - A byte value to be converted.
Return value
Resulting int value.int ToInt ( sbyte v ) #
Converts the argument's value to an integer value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Resulting int value.int ToInt ( bool v ) #
Converts the argument's value to an integer value.Arguments
- bool v - Vector multiplier.
Return value
Resulting int value.long ToLong ( string v ) #
Converts the argument's value to a long value.Arguments
- string v - A string value to be converted.
Return value
Resulting long value.long ToLong ( float v ) #
Converts the argument's value to a long value.Arguments
- float v - A float value to be converted.
Return value
Resulting long value.long ToLong ( decimal v ) #
Converts the argument's value to a long value.Arguments
- decimal v - A decimal value to be converted.
Return value
Resulting long value.long ToLong ( double v ) #
Converts the argument's value to a long value.Arguments
- double v - A double value to be converted.
Return value
Resulting long value.long ToLong ( int v ) #
Converts the argument's value to a long value.Arguments
- int v - A int value to be converted.
Return value
Resulting long value.long ToLong ( uint v ) #
Converts the argument's value to a long value.Arguments
- uint v - A uint value to be converted.
Return value
Resulting long value.long ToLong ( short v ) #
Converts the argument's value to a long value.Arguments
- short v - A short value to be converted.
Return value
Resulting long value.long ToLong ( ushort v ) #
Converts the argument's value to a long value.Arguments
- ushort v - A ushort value to be converted.
Return value
Resulting long value.long ToLong ( ulong v ) #
Converts the argument's value to a long value.Arguments
- ulong v - A ulong value to be converted.
Return value
Resulting long value.long ToLong ( byte v ) #
Converts the argument's value to a long value.Arguments
- byte v - A byte value to be converted.
Return value
Resulting long value.long ToLong ( sbyte v ) #
Converts the argument's value to a long value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Resulting long value.long ToLong ( bool v ) #
Converts the argument's value to a long value.Arguments
- bool v - Vector multiplier.
Return value
Resulting long value.byte ToByte ( string v ) #
Converts the argument's value to a byte value.Arguments
- string v - A string value to be converted.
Return value
Resulting byte value.byte ToByte ( float v ) #
Converts the argument's value to a byte value.Arguments
- float v - A float value to be converted.
Return value
Resulting byte value.byte ToByte ( decimal v ) #
Converts the argument's value to a byte value.Arguments
- decimal v - A decimal value to be converted.
Return value
Resulting byte value.byte ToByte ( double v ) #
Converts the argument's value to a byte value.Arguments
- double v - A double value to be converted.
Return value
Resulting byte value.byte ToByte ( int v ) #
Converts the argument's value to a byte value.Arguments
- int v - A int value to be converted.
Return value
Resulting byte value.byte ToByte ( uint v ) #
Converts the argument's value to a byte value.Arguments
- uint v - A uint value to be converted.
Return value
Resulting byte value.byte ToByte ( short v ) #
Converts the argument's value to a byte value.Arguments
- short v - A short value to be converted.
Return value
Resulting byte value.byte ToByte ( ushort v ) #
Converts the argument's value to a byte value.Arguments
- ushort v - A ushort value to be converted.
Return value
Resulting byte value.byte ToByte ( long v ) #
Converts the argument's value to a byte value.Arguments
- long v - A long value to be converted.
Return value
Resulting byte value.byte ToByte ( ulong v ) #
Converts the argument's value to a byte value.Arguments
- ulong v - A ulong value to be converted.
Return value
Resulting byte value.byte ToByte ( sbyte v ) #
Converts the argument's value to a byte value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Resulting byte value.byte ToByte ( bool v ) #
Converts the argument's value to a byte value.Arguments
- bool v - Vector multiplier.
Return value
Resulting byte value.bool ToBool ( string v ) #
Converts the argument's value to a boolean value.Arguments
- string v - A string value to be converted.
Return value
Converted value.bool ToBool ( float v ) #
Converts the argument's value to a boolean value.Arguments
- float v - A float value to be converted.
Return value
Converted value.bool ToBool ( decimal v ) #
Converts the argument's value to a boolean value.Arguments
- decimal v - A decimal value to be converted.
Return value
Converted value.bool ToBool ( double v ) #
Converts the argument's value to a boolean value.Arguments
- double v - A double value to be converted.
Return value
Converted value.bool ToBool ( int v ) #
Converts the argument's value to a boolean value.Arguments
- int v - A int value to be converted.
Return value
Converted value.bool ToBool ( uint v ) #
Converts the argument's value to a boolean value.Arguments
- uint v - A uint value to be converted.
Return value
Converted value.bool ToBool ( short v ) #
Converts the argument's value to a boolean value.Arguments
- short v - A short value to be converted.
Return value
Converted value.bool ToBool ( ushort v ) #
Converts the argument's value to a boolean value.Arguments
- ushort v - A ushort value to be converted.
Return value
Converted value.bool ToBool ( long v ) #
Converts the argument's value to a boolean value.Arguments
- long v - A long value to be converted.
Return value
Converted value.bool ToBool ( ulong v ) #
Converts the argument's value to a boolean value.Arguments
- ulong v - A ulong value to be converted.
Return value
Converted value.bool ToBool ( byte v ) #
Converts the argument's value to a boolean value.Arguments
- byte v - A byte value to be converted.
Return value
Converted value.bool ToBool ( sbyte v ) #
Converts the argument's value to a boolean value.Arguments
- sbyte v - A sbyte value to be converted.
Return value
Converted value.int FloatToIntBits ( float value ) #
Returns an integer corresponding to the bits of the given value.Arguments
- float value - Value to be converted.
Return value
Resulting int value.uint FloatToUIntBits ( float value ) #
Returns an unsigned integer corresponding to the bits of the given value.Arguments
- float value - Value to be converted.
Return value
Resulting uint value.float IntBitsToFloat ( int value ) #
Returns the float corresponding to the given bits.Arguments
- int value - Value to be converted.
Return value
Resulting float value.float IntBitsToFloat ( uint value ) #
Returns the unsigned float corresponding to the given bits.Arguments
- uint value - Value to be converted.
Return value
Resulting float value.long FloatToLongBits ( double value ) #
Returns a long value corresponding to the bits of the given value.Arguments
- double value - Value to be converted.
Return value
Resulting long value.double LongBitsToFloat ( long value ) #
Returns the double corresponding to the given bits.Arguments
- long value - Value to be converted.
Return value
Resulting double value.ulong DoubleIntToLong ( uint a1, uint a2 ) #
Returns a conversion of two ulong values to a ulong value.Arguments
- uint a1 - Source uint value.
- uint a2 - Source uint value.
Return value
Resulting ulong value.uint[] LongToDoubleInt ( ulong a ) #
Returns two ulong values converted from a ulong value.Arguments
- ulong a - Source ulong value.
Return value
Return value.bool Equals ( float v0, float v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- float v0 - First argument.
- float v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( double v0, double v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- double v0 - First argument.
- double v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( int v0, int v1 ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- int v0 - First argument.
- int v1 - Second argument.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( long v0, long v1 ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- long v0 - First argument.
- long v1 - Second argument.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( Vector2 v0, Vector2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector2 v0 - First argument.
- Vector2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( Vector3 v0, Vector3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector3 v0 - First argument.
- Vector3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( Vector4 v0, Vector4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector4 v0 - First argument.
- Vector4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( vec2 v0, vec2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec2 v0 - First argument.
- vec2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( vec3 v0, vec3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec3 v0 - First argument.
- vec3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( vec4 v0, vec4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec4 v0 - First argument.
- vec4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( quat v0, quat v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- quat v0 - First argument.
- quat v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( dvec2 v0, dvec2 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec2 v0 - First argument.
- dvec2 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( dvec3 v0, dvec3 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec3 v0 - First argument.
- dvec3 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( dvec4 v0, dvec4 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec4 v0 - First argument.
- dvec4 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( ivec2 v0, ivec2 v1 ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- ivec2 v0 - First argument.
- ivec2 v1 - Second argument.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( ivec3 v0, ivec3 v1 ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- ivec3 v0 - First argument.
- ivec3 v1 - Second argument.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( ivec4 v0, ivec4 v1 ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- ivec4 v0 - First argument.
- ivec4 v1 - Second argument.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( mat2 v0, mat2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat2 v0 - First argument.
- mat2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( mat3 v0, mat3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat3 v0 - First argument.
- mat3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( mat4 v0, mat4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat4 v0 - First argument.
- mat4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( dmat4 v0, dmat4 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dmat4 v0 - First argument.
- dmat4 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( BoundSphere v0, BoundSphere v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundSphere v0 - First argument.
- BoundSphere v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( BoundBox v0, BoundBox v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundBox v0 - First argument.
- BoundBox v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool Equals ( BoundFrustum v0, BoundFrustum v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundFrustum v0 - First argument.
- BoundFrustum v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( float a, float b, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- float a - First argument.
- float b - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( double a, double b, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- double a - First argument.
- double b - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( Vector2 v0, Vector2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector2 v0 - First argument.
- Vector2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( Vector3 v0, Vector3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector3 v0 - First argument.
- Vector3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( Vector4 v0, Vector4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- Vector4 v0 - First argument.
- Vector4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( vec2 v0, vec2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec2 v0 - First argument.
- vec2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( vec3 v0, vec3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec3 v0 - First argument.
- vec3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( vec4 v0, vec4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- vec4 v0 - First argument.
- vec4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( quat v0, quat v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- quat v0 - First argument.
- quat v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( dvec2 v0, dvec2 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec2 v0 - First argument.
- dvec2 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( dvec3 v0, dvec3 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec3 v0 - First argument.
- dvec3 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( dvec4 v0, dvec4 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dvec4 v0 - First argument.
- dvec4 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( mat2 v0, mat2 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat2 v0 - First argument.
- mat2 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( mat3 v0, mat3 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat3 v0 - First argument.
- mat3 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( mat4 v0, mat4 v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- mat4 v0 - First argument.
- mat4 v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( dmat4 v0, dmat4 v1, double epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- dmat4 v0 - First argument.
- dmat4 v1 - Second argument.
- double epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( BoundSphere v0, BoundSphere v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundSphere v0 - First argument.
- BoundSphere v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( BoundBox v0, BoundBox v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundBox v0 - First argument.
- BoundBox v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.bool EqualsNearly ( BoundFrustum v0, BoundFrustum v1, float epsilon ) #
Checks if two arguments represent the same value with regard to the specified accuracy (epsilon).Arguments
- BoundFrustum v0 - First argument.
- BoundFrustum v1 - Second argument.
- float epsilon - Epsilon value, that determines accuracy of comparison.
Return value
true if the arguments are equal; otherwise, false.float Abs ( float x ) #
Returns the absolute value of the specified argument.Arguments
- float x - Value.
Return value
Resulting float value.double Abs ( double x ) #
Returns the absolute value of the specified argument.Arguments
- double x - Value.
Return value
Resulting double value.decimal Abs ( decimal x ) #
Returns the absolute value of the specified argument.Arguments
- decimal x - Value.
Return value
Resulting decimal value.int Abs ( int x ) #
Returns the absolute value of the specified argument.Arguments
- int x - Value.
Return value
Resulting int value.short Abs ( short x ) #
Returns the absolute value of the specified argument.Arguments
- short x - Value.
Return value
Resulting short value.sbyte Abs ( sbyte x ) #
Returns the absolute value of the specified argument.Arguments
- sbyte x - Value.
Return value
Resulting sbyte value.long Abs ( long x ) #
Returns the absolute value of the specified argument.Arguments
- long x - Value.
Return value
Resulting long value.Vector2 Abs ( Vector2 x ) #
Returns the absolute value of the specified argument.Arguments
- Vector2 x - Value.
Return value
Return value.Vector3 Abs ( Vector3 x ) #
Returns the absolute value of the specified argument.Arguments
- Vector3 x - Value.
Return value
Return value.Vector4 Abs ( Vector4 x ) #
Returns the absolute value of the specified argument.Arguments
- Vector4 x - Value.
Return value
Return value.vec2 Abs ( vec2 v ) #
Returns the absolute value of the specified argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Abs ( vec3 v ) #
Returns the absolute value of the specified argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Abs ( vec4 v ) #
Returns the absolute value of the specified argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Abs ( dvec2 v ) #
Returns the absolute value of the specified argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Abs ( dvec3 v ) #
Returns the absolute value of the specified argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Abs ( dvec4 v ) #
Returns the absolute value of the specified argument.Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Abs ( ivec2 v ) #
Returns the absolute value of the specified argument.Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Abs ( ivec3 v ) #
Returns the absolute value of the specified argument.Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Abs ( ivec4 v ) #
Returns the absolute value of the specified argument.Arguments
- ivec4 v - Value.
Return value
Return value.bool IsNaN ( float x ) #
Returns a value that indicates whether the argument is not a number (NaN).Arguments
- float x - Value.
Return value
true if the argument is not a number (NaN); otherwise, false.bool IsNaN ( double x ) #
Returns a value that indicates whether the argument is not a number (NaN).Arguments
- double x - Value.
Return value
true if the argument is not a number (NaN); otherwise, false.bool IsNaN ( Vector2 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- Vector2 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( Vector3 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- Vector3 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( Vector4 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- Vector4 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( vec2 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- vec2 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( vec3 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- vec3 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( vec4 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- vec4 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( quat v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- quat v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( dvec2 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- dvec2 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( dvec3 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- dvec3 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNaN ( dvec4 v ) #
Returns a value that indicates whether the argument contains at least one component, which is not a number (NaN).Arguments
- dvec4 v - Value.
Return value
true if the argument contains at least one component, which is not a number (NaN); otherwise, false.bool IsNull ( float x ) #
Returns a value that indicates whether the argument is null.Arguments
- float x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( double x ) #
Returns a value that indicates whether the argument is null.Arguments
- double x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( decimal x ) #
Returns a value that indicates whether the argument is null.Arguments
- decimal x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( int x ) #
Returns a value that indicates whether the argument is null.Arguments
- int x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( short x ) #
Returns a value that indicates whether the argument is null.Arguments
- short x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( sbyte x ) #
Returns a value that indicates whether the argument is null.Arguments
- sbyte x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( long x ) #
Returns a value that indicates whether the argument is null.Arguments
- long x - Value.
Return value
true if the argument is null; otherwise, false.bool IsNull ( Vector2 v ) #
Returns a value that indicates whether the argument is null.Arguments
- Vector2 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( Vector3 v ) #
Returns a value that indicates whether the argument is null.Arguments
- Vector3 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( Vector4 v ) #
Returns a value that indicates whether the argument is null.Arguments
- Vector4 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( vec2 v ) #
Returns a value that indicates whether the argument is null.Arguments
- vec2 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( vec3 v ) #
Returns a value that indicates whether the argument is null.Arguments
- vec3 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( vec4 v ) #
Returns a value that indicates whether the argument is null.Arguments
- vec4 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( quat v ) #
Returns a value that indicates whether the argument is null.Arguments
- quat v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( dvec2 v ) #
Returns a value that indicates whether the argument is null.Arguments
- dvec2 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( dvec3 v ) #
Returns a value that indicates whether the argument is null.Arguments
- dvec3 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( dvec4 v ) #
Returns a value that indicates whether the argument is null.Arguments
- dvec4 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( ivec2 v ) #
Returns a value that indicates whether the argument is null.Arguments
- ivec2 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( ivec3 v ) #
Returns a value that indicates whether the argument is null.Arguments
- ivec3 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsNull ( ivec4 v ) #
Returns a value that indicates whether the argument is null.Arguments
- ivec4 v - Value.
Return value
true if all components of the argument are null; otherwise, false.bool IsInfinity ( float x ) #
Returns a value indicating whether the argument evaluates to negative or positive infinity.Arguments
- float x - Value.
Return value
true if the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( double x ) #
Returns a value indicating whether the argument evaluates to negative or positive infinity.Arguments
- double x - Value.
Return value
true if the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( Vector2 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- Vector2 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( Vector3 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- Vector3 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( Vector4 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- Vector4 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( vec2 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- vec2 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( vec3 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- vec3 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( vec4 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- vec4 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( quat v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- quat v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( dvec2 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- dvec2 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( dvec3 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- dvec3 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool IsInfinity ( dvec4 v ) #
Returns a value indicating whether any component of the argument evaluates to negative or positive infinity.Arguments
- dvec4 v - Value.
Return value
true if any component of the argument evaluates to negative or positive infinity; otherwise, false.bool Less ( float v0, float v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( double v0, double v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( decimal v0, decimal v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( short v0, short v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( ushort v0, ushort v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( int v0, int v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( long v0, long v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( ulong v0, ulong v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( byte v0, byte v1 ) #
Returns a value indicating whether the first argument is less than the second argument.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
true if the first argument is less than the second argument; otherwise, false.bool Less ( Vector2 v0, Vector2 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( Vector3 v0, Vector3 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( Vector4 v0, Vector4 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( vec2 v0, vec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( vec3 v0, vec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( vec4 v0, vec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( quat v0, quat v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( dvec2 v0, dvec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( dvec3 v0, dvec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( dvec4 v0, dvec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( ivec2 v0, ivec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( ivec3 v0, ivec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool Less ( ivec4 v0, ivec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than all components of the second argument.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
true if all components of the first argument are less than all components of the second argument; otherwise, false.bool LessOrEqual ( float v0, float v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( double v0, double v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( decimal v0, decimal v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( short v0, short v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( ushort v0, ushort v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( int v0, int v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( long v0, long v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( ulong v0, ulong v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( byte v0, byte v1 ) #
Returns a value indicating whether the first argument is less than or equal to the second argument.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
true if the first argument is less than or equal to the second argument; otherwise, false.bool LessOrEqual ( Vector2 v0, Vector2 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( Vector3 v0, Vector3 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( Vector4 v0, Vector4 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( vec2 v0, vec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( vec3 v0, vec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( vec4 v0, vec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( quat v0, quat v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( dvec2 v0, dvec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( dvec3 v0, dvec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( dvec4 v0, dvec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( ivec2 v0, ivec2 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( ivec3 v0, ivec3 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool LessOrEqual ( ivec4 v0, ivec4 v1 ) #
Returns a value indicating whether all components of the first argument are less than or equal to all components of the second argument.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
true if all components of the first argument are less than or equal to all components of the second argument; otherwise, false.bool More ( float v0, float v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( double v0, double v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( decimal v0, decimal v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( short v0, short v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( ushort v0, ushort v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( int v0, int v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( long v0, long v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( ulong v0, ulong v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( byte v0, byte v1 ) #
Returns a value indicating whether the first argument is greater than the second argument.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
true if the first argument is greater than the second argument; otherwise, false.bool More ( Vector2 v0, Vector2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( Vector3 v0, Vector3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( Vector4 v0, Vector4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( vec2 v0, vec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( vec3 v0, vec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( vec4 v0, vec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( quat v0, quat v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( dvec2 v0, dvec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( dvec3 v0, dvec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( dvec4 v0, dvec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( ivec2 v0, ivec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( ivec3 v0, ivec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool More ( ivec4 v0, ivec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than all components of the second argument.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
true if all components of the first argument are greater than all components of the second argument; otherwise, false.bool MoreOrEqual ( float v0, float v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( double v0, double v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( decimal v0, decimal v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( short v0, short v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( ushort v0, ushort v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( int v0, int v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( long v0, long v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( ulong v0, ulong v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( byte v0, byte v1 ) #
Returns a value indicating whether the first argument is greater than or equal to the second argument.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
true if the first argument is greater than or equal to the second argument; otherwise, false.bool MoreOrEqual ( Vector2 v0, Vector2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( Vector3 v0, Vector3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( Vector4 v0, Vector4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( vec2 v0, vec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( vec3 v0, vec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( vec4 v0, vec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( quat v0, quat v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( dvec2 v0, dvec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( dvec3 v0, dvec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( dvec4 v0, dvec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( ivec2 v0, ivec2 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( ivec3 v0, ivec3 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.bool MoreOrEqual ( ivec4 v0, ivec4 v1 ) #
Returns a value indicating whether all components of the first argument are greater than or equal to all components of the second argument.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
true if all components of the first argument are greater than or equal to all components of the second argument; otherwise, false.float Inc ( float v ) #
Increments a source value and returns the result.Arguments
- float v - Value.
Return value
Resulting float value.double Inc ( double v ) #
Increments a source value and returns the result.Arguments
- double v - Value.
Return value
Resulting double value.decimal Inc ( decimal v ) #
Increments a source value and returns the result.Arguments
- decimal v - Value.
Return value
Resulting decimal value.short Inc ( short v ) #
Increments a source value and returns the result.Arguments
- short v - Value.
Return value
Resulting short value.ushort Inc ( ushort v ) #
Increments a source value and returns the result.Arguments
- ushort v - Value.
Return value
Resulting ushort value.int Inc ( int v ) #
Increments a source value and returns the result.Arguments
- int v - Value.
Return value
Resulting int value.long Inc ( long v ) #
Increments a source value and returns the result.Arguments
- long v - Value.
Return value
Resulting long value.ulong Inc ( ulong v ) #
Increments a source value and returns the result.Arguments
- ulong v - Value.
Return value
Resulting ulong value.byte Inc ( byte v ) #
Increments a source value and returns the result.Arguments
- byte v - Value.
Return value
Resulting byte value.Vector2 Inc ( Vector2 v ) #
Increments each component of the source value and returns the result.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Inc ( Vector3 v ) #
Increments each component of the source value and returns the result.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Inc ( Vector4 v ) #
Increments each component of the source value and returns the result.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Inc ( vec2 v ) #
Increments each component of the source value and returns the result.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Inc ( vec3 v ) #
Increments each component of the source value and returns the result.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Inc ( vec4 v ) #
Increments each component of the source value and returns the result.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Inc ( dvec2 v ) #
Increments each component of the source value and returns the result.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Inc ( dvec3 v ) #
Increments each component of the source value and returns the result.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Inc ( dvec4 v ) #
Increments each component of the source value and returns the result.Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Inc ( ivec2 v ) #
Increments each component of the source value and returns the result.Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Inc ( ivec3 v ) #
Increments each component of the source value and returns the result.Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Inc ( ivec4 v ) #
Increments each component of the source value and returns the result.Arguments
- ivec4 v - Value.
Return value
Return value.bvec4 Inc ( bvec4 v ) #
Increments each component of the source value and returns the result.Arguments
- bvec4 v - Value.
Return value
Return value.float Dec ( float v ) #
Decrements each component of the source value and returns the result.Arguments
- float v - Value.
Return value
Resulting float value.double Dec ( double v ) #
Decrements a source value and returns the result.Arguments
- double v - Value.
Return value
Resulting double value.decimal Dec ( decimal v ) #
Decrements a source value and returns the result.Arguments
- decimal v - Value.
Return value
Resulting decimal value.short Dec ( short v ) #
Decrements a source value and returns the result.Arguments
- short v - Value.
Return value
Resulting short value.ushort Dec ( ushort v ) #
Decrements a source value and returns the result.Arguments
- ushort v - Value.
Return value
Resulting ushort value.int Dec ( int v ) #
Decrements a source value and returns the result.Arguments
- int v - Value.
Return value
Resulting int value.long Dec ( long v ) #
Decrements a source value and returns the result.Arguments
- long v - Value.
Return value
Resulting long value.ulong Dec ( ulong v ) #
Decrements a source value and returns the result.Arguments
- ulong v - Value.
Return value
Resulting ulong value.byte Dec ( byte v ) #
Decrements a source value and returns the result.Arguments
- byte v - Value.
Return value
Resulting byte value.Vector2 Dec ( Vector2 v ) #
Decrements each component of the source value and returns the result.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Dec ( Vector3 v ) #
Decrements each component of the source value and returns the result.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Dec ( Vector4 v ) #
Decrements each component of the source value and returns the result.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Dec ( vec2 v ) #
Decrements each component of the source value and returns the result.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Dec ( vec3 v ) #
Decrements each component of the source value and returns the result.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Dec ( vec4 v ) #
Decrements each component of the source value and returns the result.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Dec ( dvec2 v ) #
Decrements each component of the source value and returns the result.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Dec ( dvec3 v ) #
Decrements each component of the source value and returns the result.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Dec ( dvec4 v ) #
Decrements each component of the source value and returns the result.Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Dec ( ivec2 v ) #
Decrements each component of the source value and returns the result.Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Dec ( ivec3 v ) #
Decrements each component of the source value and returns the result.Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Dec ( ivec4 v ) #
Decrements each component of the source value and returns the result.Arguments
- ivec4 v - Value.
Return value
Return value.bvec4 Dec ( bvec4 v ) #
Decrements each component of the source value and returns the result.Arguments
- bvec4 v - Value.
Return value
Return value.float Negative ( float v ) #
Returns the negative of a source value.Arguments
- float v - Value.
Return value
Resulting float value.double Negative ( double v ) #
Returns the negative of a source value.Arguments
- double v - Value.
Return value
Resulting double value.decimal Negative ( decimal v ) #
Returns the negative of a source value.Arguments
- decimal v - Value.
Return value
Resulting decimal value.int Negative ( int v ) #
Returns the negative of a source value.Arguments
- int v - Value.
Return value
Resulting int value.long Negative ( long v ) #
Returns the negative of a source value.Arguments
- long v - Value.
Return value
Resulting long value.Vector2 Negative ( Vector2 v ) #
Returns the negative of the source value components.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Negative ( Vector3 v ) #
Returns the negative of the source value components.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Negative ( Vector4 v ) #
Returns the negative of the source value components.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Negative ( vec2 v ) #
Returns the negative of the source value components.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Negative ( vec3 v ) #
Returns the negative of the source value components.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Negative ( vec4 v ) #
Returns the negative of the source value components.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Negative ( dvec2 v ) #
Returns the negative of the source value components.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Negative ( dvec3 v ) #
Returns the negative of the source value componentsArguments
- dvec3 v - Value.
Return value
Return value.dvec4 Negative ( dvec4 v ) #
Returns the negative of the source value components.Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Negative ( ivec2 v ) #
Returns the negative of the source value components.Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Negative ( ivec3 v ) #
Returns the negative of the source value components.Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Negative ( ivec4 v ) #
Returns the negative of the source value components.Arguments
- ivec4 v - Value.
Return value
Return value.float Sin ( float v ) #
Returns the sine of an argument.Arguments
- float v - Value.
Return value
Resulting float value.double Sin ( double v ) #
Returns the sine of an argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Sin ( Vector2 v ) #
Returns the sine of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Sin ( Vector3 v ) #
Returns the sine of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Sin ( Vector4 v ) #
Returns the sine of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Sin ( vec2 v ) #
Returns the sine of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Sin ( vec3 v ) #
Returns the sine of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Sin ( vec4 v ) #
Returns the sine of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Sin ( dvec2 v ) #
Returns the sine of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Sin ( dvec3 v ) #
Returns the sine of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Sin ( dvec4 v ) #
Returns the sine of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Sinh ( float v ) #
Returns the hyperbolic sine of an argument.Arguments
- float v - Value.
Return value
Resulting float value.double Sinh ( double v ) #
Returns the hyperbolic sine of an argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Sinh ( Vector2 v ) #
Returns the hyperbolic sine of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Sinh ( Vector3 v ) #
Returns the hyperbolic sine of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Sinh ( Vector4 v ) #
Returns the hyperbolic sine of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Sinh ( vec2 v ) #
Returns the hyperbolic sine of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Sinh ( vec3 v ) #
Returns the hyperbolic sine of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Sinh ( vec4 v ) #
Returns the hyperbolic sine of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Sinh ( dvec2 v ) #
Returns the hyperbolic sine of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Sinh ( dvec3 v ) #
Returns the hyperbolic sine of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Sinh ( dvec4 v ) #
Returns the hyperbolic sine of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Asin ( float v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- float v - Value.
Return value
Resulting float value.double Asin ( double v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Asin ( Vector2 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Asin ( Vector3 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Asin ( Vector4 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Asin ( vec2 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Asin ( vec3 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Asin ( vec4 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Asin ( dvec2 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Asin ( dvec3 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Asin ( dvec4 v ) #
Returns the arc sine of the argument — the angle in radians, whose sine is equal to the argument. a == sin(asin(a)) for every value that is within asin()'s range.Arguments
- dvec4 v - Value.
Return value
Return value.float Cos ( float angle_radians ) #
Returns the cosine of an argument.Arguments
- float angle_radians - Angle, in radians.
Return value
Resulting float value.double Cos ( double angle_radians ) #
Returns the cosine of an argument.Arguments
- double angle_radians - Angle, in radians.
Return value
Resulting double value.Vector2 Cos ( Vector2 v ) #
Returns the cosine of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Cos ( Vector3 v ) #
Returns the cosine of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Cos ( Vector4 v ) #
Returns the cosine of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Cos ( vec2 v ) #
Returns the cosine of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Cos ( vec3 v ) #
Returns the cosine of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Cos ( vec4 v ) #
Returns the cosine of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Cos ( dvec2 v ) #
Returns the cosine of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Cos ( dvec3 v ) #
Returns the cosine of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Cos ( dvec4 v ) #
Returns the cosine of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Cosh ( float angle_radians ) #
Returns the hyperbolic cosine of an argument.Arguments
- float angle_radians - Angle, in radians.
Return value
Resulting float value.double Cosh ( double angle_radians ) #
Returns the hyperbolic cosine of an argument.Arguments
- double angle_radians - Angle, in radians.
Return value
Resulting double value.Vector2 Cosh ( Vector2 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Cosh ( Vector3 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Cosh ( Vector4 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Cosh ( vec2 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Cosh ( vec3 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Cosh ( vec4 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Cosh ( dvec2 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Cosh ( dvec3 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Cosh ( dvec4 v ) #
Returns the hyperbolic cosine of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Acos ( float x ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- float x - Value.
Return value
Resulting float value.double Acos ( double x ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- double x - Value.
Return value
Resulting double value.Vector2 Acos ( Vector2 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Acos ( Vector3 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Acos ( Vector4 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Acos ( vec2 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Acos ( vec3 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Acos ( vec4 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Acos ( dvec2 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Acos ( dvec3 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Acos ( dvec4 v ) #
Returns the arc cosine of the argument — the angle in radians, whose cosine is equal to the argument. a == cos(acos(a)) for every value that is within acos()'s range.Arguments
- dvec4 v - Value.
Return value
Return value.void SinCos ( float angle_radians, float out_sin, float out_cos ) #
Calculates sine and cosine values for the specified angle value given in radians and puts them to out_sin and out_cos.Arguments
- float angle_radians - Angle, in radians.
- float out_sin - variable, to which the calsulated sine value is to be put.
- float out_cos - variable, to which the calsulated cosine value is to be put.
void SinCos ( double angle_radians, double out_sin, double out_cos ) #
Calculates sine and cosine values for the specified angle value given in radians and puts them to out_sin and out_cos.Arguments
- double angle_radians - Angle, in radians.
- double out_sin - variable, to which the calsulated sine value is to be put.
- double out_cos - variable, to which the calsulated cosine value is to be put.
float Tan ( float v ) #
Returns the tangent of an argument.Arguments
- float v - Value.
Return value
Resulting float value.double Tan ( double v ) #
Returns the tangent of an argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Tan ( Vector2 v ) #
Returns the tangent of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Tan ( Vector3 v ) #
Returns the tangent of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Tan ( Vector4 v ) #
Returns the tangent of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Tan ( vec2 v ) #
Returns the tangent of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Tan ( vec3 v ) #
Returns the tangent of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Tan ( vec4 v ) #
Returns the tangent of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Tan ( dvec2 v ) #
Returns the tangent of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Tan ( dvec3 v ) #
Returns the tangent of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Tan ( dvec4 v ) #
Returns the tangent of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Tanh ( float v ) #
Returns the hyperbolic tangent of an argument.Arguments
- float v - Value.
Return value
Resulting float value.double Tanh ( double v ) #
Returns the hyperbolic tangent of an argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Tanh ( Vector2 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Tanh ( Vector3 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Tanh ( Vector4 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Tanh ( vec2 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Tanh ( vec3 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Tanh ( vec4 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Tanh ( dvec2 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Tanh ( dvec3 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Tanh ( dvec4 v ) #
Returns the hyperbolic tangent of an argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Atan ( float v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- float v - Value.
Return value
Resulting float value.double Atan ( double v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Atan ( Vector2 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Atan ( Vector3 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Atan ( Vector4 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Atan ( vec2 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Atan ( vec3 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Atan ( vec4 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Atan ( dvec2 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Atan ( dvec3 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Atan ( dvec4 v ) #
Returns the arc tangent of the argument — the angle in radians, whose tangent is equal to the argument. a == tan(atan(a)) for every value that is within atan()'s range.Arguments
- dvec4 v - Value.
Return value
Return value.float Atan2 ( float v0, float v1 ) #
Returns the arc tangent of two arguments (x and y). It is similar to calculating the arc tangent of y / x, except that the signs of both arguments are used to determine the quadrant of the result.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
Resulting float value.double Atan2 ( double v0, double v1 ) #
Returns the arc tangent of two arguments (x and y). It is similar to calculating the arc tangent of y / x, except that the signs of both arguments are used to determine the quadrant of the result.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
Resulting double value.float Atan2 ( Vector2 v ) #
Returns the arc tangent of two vector components (x and y). It is similar to calculating the arc tangent of y / x, except that the signs of both components are used to determine the quadrant of the result.Arguments
- Vector2 v - Vector of 2 components.
Return value
Resulting float value.float Atan2 ( vec2 v ) #
Returns the arc tangent of two vector components (x and y). It is similar to calculating the arc tangent of y / x, except that the signs of both components are used to determine the quadrant of the result.Arguments
- vec2 v - Vector of 2 components.
Return value
Resulting float value.double Atan2 ( dvec2 v ) #
Returns the arc tangent of two vector components (x and y). It is similar to calculating the arc tangent of y / x, except that the signs of both components are used to determine the quadrant of the result.Arguments
- dvec2 v
Return value
Resulting double value.float Exp ( float v ) #
Returns e raised to the specified power (ev).Arguments
- float v - Value.
Return value
Resulting float value.double Exp ( double v ) #
Returns e raised to the specified power (ev).Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Exp ( Vector2 v ) #
Returns e raised to the specified power (ev).Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Exp ( Vector3 v ) #
Returns e raised to the specified power (ev).Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Exp ( Vector4 v ) #
Returns e raised to the specified power (ev).Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Exp ( vec2 v ) #
Returns e raised to the specified power (ev).Arguments
- vec2 v - Value.
Return value
Return value.vec3 Exp ( vec3 v ) #
Returns e raised to the specified power (ev).Arguments
- vec3 v - Value.
Return value
Return value.vec4 Exp ( vec4 v ) #
Returns e raised to the specified power (ev).Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Exp ( dvec2 v ) #
Returns e raised to the specified power (ev).Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Exp ( dvec3 v ) #
Returns e raised to the specified power (ev).Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Exp ( dvec4 v ) #
Returns e raised to the specified power (ev).Arguments
- dvec4 v - Value.
Return value
Return value.float Exp2 ( float v ) #
Returns 2 raised to the specified power (2v).Arguments
- float v - Value.
Return value
Resulting float value.double Exp2 ( double v ) #
Returns 2 raised to the specified power (2v).Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Exp2 ( Vector2 v ) #
Returns 2 raised to the specified power (2v).Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Exp2 ( Vector3 v ) #
Returns 2 raised to the specified power (2v).Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Exp2 ( Vector4 v ) #
Returns 2 raised to the specified power (2v).Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Exp2 ( vec2 v ) #
Returns 2 raised to the specified power (2v).Arguments
- vec2 v - Value.
Return value
Return value.vec3 Exp2 ( vec3 v ) #
Returns 2 raised to the specified power (2v).Arguments
- vec3 v - Value.
Return value
Return value.vec4 Exp2 ( vec4 v ) #
Returns 2 raised to the specified power (2v).Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Exp2 ( dvec2 v ) #
Returns 2 raised to the specified power (2v).Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Exp2 ( dvec3 v ) #
Returns 2 raised to the specified power (2v).Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Exp2 ( dvec4 v ) #
Returns 2 raised to the specified power (2v).Arguments
- dvec4 v - Value.
Return value
Return value.float Sqrt ( float v ) #
Returns the square root of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Sqrt ( double v ) #
Returns the square root of the argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Sqrt ( Vector2 v ) #
Returns the square root of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Sqrt ( Vector3 v ) #
Returns the square root of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Sqrt ( Vector4 v ) #
Returns the square root of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Sqrt ( vec2 v ) #
Returns the square root of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Sqrt ( vec3 v ) #
Returns the square root of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Sqrt ( vec4 v ) #
Returns the square root of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Sqrt ( dvec2 v ) #
Returns the square root of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Sqrt ( dvec3 v ) #
Returns the square root of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Sqrt ( dvec4 v ) #
Returns the square root of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Rsqrt ( float v ) #
Returns the inverted square root of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Rsqrt ( double v ) #
Returns the inverted square root of the argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Rsqrt ( Vector2 v ) #
Returns the inverted square root of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Rsqrt ( Vector3 v ) #
Returns the inverted square root of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Rsqrt ( Vector4 v ) #
Returns the inverted square root of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Rsqrt ( vec2 v ) #
Returns the inverted square root of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Rsqrt ( vec3 v ) #
Returns the inverted square root of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Rsqrt ( vec4 v ) #
Returns the inverted square root of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Rsqrt ( dvec2 v ) #
Returns the inverted square root of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Rsqrt ( dvec3 v ) #
Returns the inverted square root of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Rsqrt ( dvec4 v ) #
Returns the inverted square root of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Log ( float v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- float v - Value.
Return value
Resulting float value.double Log ( double v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Log ( Vector2 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Log ( Vector3 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Log ( Vector4 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Log ( vec2 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Log ( vec3 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Log ( vec4 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Log ( dvec2 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Log ( dvec3 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Log ( dvec4 v ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- dvec4 v - Value.
Return value
Return value.float Log2 ( float v ) #
Returns the base 2 logarithm of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Log2 ( double v ) #
Returns the base 2 logarithm of the argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Log2 ( Vector2 v ) #
Returns the base 2 logarithm of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Log2 ( Vector3 v ) #
Returns the base 2 logarithm of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Log2 ( Vector4 v ) #
Returns the base 2 logarithm of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Log2 ( vec2 v ) #
Returns the base 2 logarithm of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Log2 ( vec3 v ) #
Returns the base 2 logarithm of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Log2 ( vec4 v ) #
Returns the base 2 logarithm of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Log2 ( dvec2 v ) #
Returns the base 2 logarithm of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Log2 ( dvec3 v ) #
Returns the base 2 logarithm of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Log2 ( dvec4 v ) #
Returns the base 2 logarithm of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Log10 ( float v ) #
Returns the base 10 logarithm of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Log10 ( double v ) #
Returns the base 10 logarithm of the argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Log10 ( Vector2 v ) #
Returns the base 10 logarithm of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Log10 ( Vector3 v ) #
Returns the base 10 logarithm of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Log10 ( Vector4 v ) #
Returns the base 10 logarithm of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Log10 ( vec2 v ) #
Returns the base 10 logarithm of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Log10 ( vec3 v ) #
Returns the base 10 logarithm of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Log10 ( vec4 v ) #
Returns the base 10 logarithm of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Log10 ( dvec2 v ) #
Returns the base 10 logarithm of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Log10 ( dvec3 v ) #
Returns the base 10 logarithm of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Log10 ( dvec4 v ) #
Returns the base 10 logarithm of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Log ( float v, float new_base ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- float v - Value.
- float new_base - New logarithm base.
Return value
Resulting float value.double Log ( double v, double new_base ) #
Returns the natural logarithm of the argument in a specified base.Arguments
- double v - Value.
- double new_base - New logarithm base.
Return value
Resulting double value.float Pow ( float v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
Resulting float value.double Pow ( double v0, double v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
Resulting double value.Vector2 Pow ( Vector2 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- Vector2 v0 - First value.
- float v1 - Second value.
Return value
Return value.Vector3 Pow ( Vector3 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- Vector3 v0 - First value.
- float v1 - Second value.
Return value
Return value.Vector4 Pow ( Vector4 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- Vector4 v0 - First value.
- float v1 - Second value.
Return value
Return value.vec2 Pow ( vec2 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec2 v0 - First value.
- float v1 - Second value.
Return value
Return value.vec3 Pow ( vec3 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec3 v0 - First value.
- float v1 - Second value.
Return value
Return value.vec4 Pow ( vec4 v0, float v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec4 v0 - First value.
- float v1 - Second value.
Return value
Return value.dvec2 Pow ( dvec2 v0, double v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec2 v0 - First value.
- double v1 - Second value.
Return value
Return value.dvec3 Pow ( dvec3 v0, double v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec3 v0 - First value.
- double v1 - Second value.
Return value
Return value.dvec4 Pow ( dvec4 v0, double v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec4 v0 - First value.
- double v1 - Second value.
Return value
Return value.vec2 Pow ( vec2 v0, vec2 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
Return value.vec3 Pow ( vec3 v0, vec3 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
Return value.vec4 Pow ( vec4 v0, vec4 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
Return value.dvec2 Pow ( dvec2 v0, dvec2 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
Return value.dvec3 Pow ( dvec3 v0, dvec3 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
Return value.dvec4 Pow ( dvec4 v0, dvec4 v1 ) #
Returns the argument raised to the specified power (xy).Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
Return value.float Pow2 ( float v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- float v - Value.
Return value
Resulting float value.double Pow2 ( double v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- double v - Value.
Return value
Resulting double value.decimal Pow2 ( decimal v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- decimal v - Value.
Return value
Resulting decimal value.int Pow2 ( int v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- int v - Value.
Return value
Resulting int value.uint Pow2 ( uint v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- uint v - Value.
Return value
Resulting uint value.short Pow2 ( short v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- short v - Value.
Return value
Resulting short value.ushort Pow2 ( ushort v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- ushort v - Value.
Return value
Resulting ushort value.long Pow2 ( long v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- long v - Value.
Return value
Resulting long value.ulong Pow2 ( ulong v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- ulong v - Value.
Return value
Resulting ulong value.byte Pow2 ( byte v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- byte v - Value.
Return value
Resulting byte value.sbyte Pow2 ( sbyte v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- sbyte v - Value.
Return value
Resulting sbyte value.Vector2 Pow2 ( Vector2 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Pow2 ( Vector3 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Pow2 ( Vector4 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Pow2 ( vec2 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- vec2 v - Value.
Return value
Return value.vec3 Pow2 ( vec3 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- vec3 v - Value.
Return value
Return value.vec4 Pow2 ( vec4 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Pow2 ( dvec2 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Pow2 ( dvec3 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Pow2 ( dvec4 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Pow2 ( ivec2 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Pow2 ( ivec3 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Pow2 ( ivec4 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- ivec4 v - Value.
Return value
Return value.bvec4 Pow2 ( bvec4 v ) #
Returns the argument raised to the power of 2 (squared).Arguments
- bvec4 v - Value.
Return value
Return value.float Pow3 ( float v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- float v - Value.
Return value
Resulting float value.double Pow3 ( double v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- double v - Value.
Return value
Resulting double value.decimal Pow3 ( decimal v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- decimal v - Value.
Return value
Resulting decimal value.int Pow3 ( int v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- int v - Value.
Return value
Resulting int value.uint Pow3 ( uint v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- uint v - Value.
Return value
Resulting uint value.short Pow3 ( short v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- short v - Value.
Return value
Resulting short value.ushort Pow3 ( ushort v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- ushort v - Value.
Return value
Resulting ushort value.long Pow3 ( long v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- long v - Value.
Return value
Resulting long value.ulong Pow3 ( ulong v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- ulong v - Value.
Return value
Resulting ulong value.byte Pow3 ( byte v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- byte v - Value.
Return value
Resulting byte value.sbyte Pow3 ( sbyte v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- sbyte v - Value.
Return value
Resulting sbyte value.Vector2 Pow3 ( Vector2 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Pow3 ( Vector3 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Pow3 ( Vector4 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Pow3 ( vec2 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- vec2 v - Value.
Return value
Return value.vec3 Pow3 ( vec3 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- vec3 v - Value.
Return value
Return value.vec4 Pow3 ( vec4 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Pow3 ( dvec2 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Pow3 ( dvec3 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Pow3 ( dvec4 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Pow3 ( ivec2 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Pow3 ( ivec3 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Pow3 ( ivec4 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- ivec4 v - Value.
Return value
Return value.bvec4 Pow3 ( bvec4 v ) #
Returns the argument raised to the power of 3 (cube).Arguments
- bvec4 v - Value.
Return value
Return value.float Pow4 ( float v ) #
Returns the argument raised to the power of 4.Arguments
- float v - Value.
Return value
Resulting float value.double Pow4 ( double v ) #
Returns the argument raised to the power of 4.Arguments
- double v - Value.
Return value
Resulting double value.decimal Pow4 ( decimal v ) #
Returns the argument raised to the power of 4.Arguments
- decimal v - Value.
Return value
Resulting decimal value.int Pow4 ( int v ) #
Returns the argument raised to the power of 4.Arguments
- int v - Value.
Return value
Resulting int value.uint Pow4 ( uint v ) #
Returns the argument raised to the power of 4.Arguments
- uint v - Value.
Return value
Resulting uint value.short Pow4 ( short v ) #
Returns the argument raised to the power of 4.Arguments
- short v - Value.
Return value
Resulting short value.ushort Pow4 ( ushort v ) #
Returns the argument raised to the power of 4.Arguments
- ushort v - Value.
Return value
Resulting ushort value.long Pow4 ( long v ) #
Returns the argument raised to the power of 4.Arguments
- long v - Value.
Return value
Resulting long value.ulong Pow4 ( ulong v ) #
Returns the argument raised to the power of 4.Arguments
- ulong v - Value.
Return value
Resulting ulong value.byte Pow4 ( byte v ) #
Returns the argument raised to the power of 4.Arguments
- byte v - Value.
Return value
Resulting byte value.sbyte Pow4 ( sbyte v ) #
Returns the argument raised to the power of 4.Arguments
- sbyte v - Value.
Return value
Resulting sbyte value.Vector2 Pow4 ( Vector2 v ) #
Returns the argument raised to the power of 4.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Pow4 ( Vector3 v ) #
Returns the argument raised to the power of 4.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Pow4 ( Vector4 v ) #
Returns the argument raised to the power of 4.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Pow4 ( vec2 v ) #
Returns the argument raised to the power of 4.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Pow4 ( vec3 v ) #
Returns the argument raised to the power of 4.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Pow4 ( vec4 v ) #
Returns the argument raised to the power of 4.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Pow4 ( dvec2 v ) #
Returns the argument raised to the power of 4.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Pow4 ( dvec3 v ) #
Returns the argument raised to the power of 4.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Pow4 ( dvec4 v ) #
Returns the argument raised to the power of 4.Arguments
- dvec4 v - Value.
Return value
Return value.ivec2 Pow4 ( ivec2 v ) #
Returns the argument raised to the power of 4.Arguments
- ivec2 v - Value.
Return value
Return value.ivec3 Pow4 ( ivec3 v ) #
Returns the argument raised to the power of 4.Arguments
- ivec3 v - Value.
Return value
Return value.ivec4 Pow4 ( ivec4 v ) #
Returns the argument raised to the power of 4.Arguments
- ivec4 v - Value.
Return value
Return value.bvec4 Pow4 ( bvec4 v ) #
Returns the argument raised to the power of 4.Arguments
- bvec4 v - Value.
Return value
Return value.float Srgb ( float v ) #
Converts RGB color value to sRGB format.Arguments
- float v - Value.
Return value
Resulting float value.double Srgb ( double v ) #
Converts RGB color value to sRGB format.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Srgb ( Vector2 v ) #
Converts RGB color value to sRGB format.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Srgb ( Vector3 v ) #
Converts RGB color value to sRGB format.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Srgb ( Vector4 v ) #
Converts RGB color value to sRGB format.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Srgb ( vec2 v ) #
Converts RGB color value to sRGB format.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Srgb ( vec3 v ) #
Converts RGB color value to sRGB format.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Srgb ( vec4 v ) #
Converts RGB color value to sRGB format.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Srgb ( dvec2 v ) #
Converts RGB color value to sRGB format.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Srgb ( dvec3 v ) #
Converts RGB color value to sRGB format.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Srgb ( dvec4 v ) #
Converts RGB color value to sRGB format.Arguments
- dvec4 v - Value.
Return value
Return value.float ISrgb ( float v ) #
Converts sRGB color value to RGB format.Arguments
- float v - sRGB color.
Return value
Resulting float value.double ISrgb ( double v ) #
Converts sRGB color value to RGB format.Arguments
- double v - sRGB color.
Return value
Resulting double value.Vector2 ISrgb ( Vector2 v ) #
Converts sRGB color value to RGB format.Arguments
- Vector2 v - sRGB color.
Return value
Return value.Vector3 ISrgb ( Vector3 v ) #
Converts sRGB color value to RGB format.Arguments
- Vector3 v - sRGB color.
Return value
Return value.Vector4 ISrgb ( Vector4 v ) #
Converts sRGB color value to RGB format.Arguments
- Vector4 v - sRGB color.
Return value
Return value.vec2 ISrgb ( vec2 v ) #
Converts sRGB color value to RGB format.Arguments
- vec2 v - sRGB color.
Return value
Return value.vec3 ISrgb ( vec3 v ) #
Converts sRGB color value to RGB format.Arguments
- vec3 v - sRGB color.
Return value
Return value.vec4 ISrgb ( vec4 v ) #
Converts sRGB color value to RGB format.Arguments
- vec4 v - sRGB color.
Return value
Return value.dvec2 ISrgb ( dvec2 v ) #
Converts sRGB color value to RGB format.Arguments
- dvec2 v - sRGB color.
Return value
Return value.dvec3 ISrgb ( dvec3 v ) #
Converts sRGB color value to RGB format.Arguments
- dvec3 v - sRGB color.
Return value
Return value.dvec4 ISrgb ( dvec4 v ) #
Converts sRGB color value to RGB format.Arguments
- dvec4 v - sRGB color.
Return value
Return value.float Rcp ( float v ) #
Returns the reciprocal of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Rcp ( double v ) #
Returns the reciprocal of the argument.Arguments
- double v - Value.
Return value
Resulting double value.Vector2 Rcp ( Vector2 v ) #
Returns the reciprocal of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Rcp ( Vector3 v ) #
Returns the reciprocal of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Rcp ( Vector4 v ) #
Returns the reciprocal of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Rcp ( vec2 v ) #
Returns the reciprocal of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Rcp ( vec3 v ) #
Returns the reciprocal of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Rcp ( vec4 v ) #
Returns the reciprocal of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Rcp ( dvec2 v ) #
Returns the reciprocal of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Rcp ( dvec3 v ) #
Returns the reciprocal of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Rcp ( dvec4 v ) #
Returns the reciprocal of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Mod ( float x, float y ) #
Returns the floating-point remainder of the division operation: first argument / second argument.Arguments
- float x - Value.
- float y - Value.
Return value
Resulting float value.double Mod ( double x, double y ) #
Returns the floating-point remainder of the division operation: first argument / second argument.Arguments
- double x - Value.
- double y - Value.
Return value
Resulting double value.int Sign ( float v ) #
Returns an integral value indicating the sign of an argument.Arguments
- float v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( double v ) #
Returns an integral value indicating the sign of an argument.Arguments
- double v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( decimal v ) #
Returns an integral value indicating the sign of an argument.Arguments
- decimal v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( sbyte v ) #
Returns an integral value indicating the sign of an argument.Arguments
- sbyte v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( long v ) #
Returns an integral value indicating the sign of an argument.Arguments
- long v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( short v ) #
Returns an integral value indicating the sign of an argument.Arguments
- short v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
int Sign ( int v ) #
Returns an integral value indicating the sign of an argument.Arguments
- int v - Value.
Return value
Sign of the argument:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
Vector2 Sign ( Vector2 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- Vector2 v - Vector of 2 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
Vector3 Sign ( Vector3 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- Vector3 v - Vector of 3 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
Vector4 Sign ( Vector4 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- Vector4 v - Vector of 4 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
vec2 Sign ( vec2 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- vec2 v - Vector of 2 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
vec3 Sign ( vec3 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- vec3 v - Vector of 3 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
vec4 Sign ( vec4 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- vec4 v - Vector of 4 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
dvec2 Sign ( dvec2 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- dvec2 v - Vector of 2 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
dvec3 Sign ( dvec3 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- dvec3 v - Vector of 3 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
dvec4 Sign ( dvec4 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- dvec4 v - Vector of 4 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
ivec2 Sign ( ivec2 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- ivec2 v - Vector of 2 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
ivec3 Sign ( ivec3 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- ivec3 v - Vector of 3 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
ivec4 Sign ( ivec4 v ) #
Returns an integral value indicating the sign of an argument.Arguments
- ivec4 v - Vector of 4 components.
Return value
Vector with components containing the sign of the argument components:- 1.0 if the value is greater than 0
- 0 if the value is equal to 0
- -1.0 if the value is less than 0
float Max ( float v0, float v1 ) #
Compares the arguments and returns the maximum value.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
Resulting float value.double Max ( double v0, double v1 ) #
Compares the arguments and returns the maximum value.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
Resulting double value.decimal Max ( decimal v0, decimal v1 ) #
Compares the arguments and returns the maximum value.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
Resulting decimal value.short Max ( short v0, short v1 ) #
Compares the arguments and returns the maximum value.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
Resulting short value.ushort Max ( ushort v0, ushort v1 ) #
Compares the arguments and returns the maximum value.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
Resulting ushort value.int Max ( int v0, int v1 ) #
Compares the arguments and returns the maximum value.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
Resulting int value.long Max ( long v0, long v1 ) #
Compares the arguments and returns the maximum value.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
Resulting long value.ulong Max ( ulong v0, ulong v1 ) #
Compares the arguments and returns the maximum value.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
Resulting ulong value.byte Max ( byte v0, byte v1 ) #
Compares the arguments and returns the maximum value.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
Resulting byte value.Vector2 Max ( Vector2 v0, Vector2 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
Return value.Vector3 Max ( Vector3 v0, Vector3 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
Return value.Vector4 Max ( Vector4 v0, Vector4 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
Return value.vec2 Max ( vec2 v0, vec2 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
Return value.vec3 Max ( vec3 v0, vec3 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
Return value.vec4 Max ( vec4 v0, vec4 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
Return value.quat Max ( quat v0, quat v1 ) #
Compares the arguments and returns the maximum value.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
Return value.dvec2 Max ( dvec2 v0, dvec2 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
Return value.dvec3 Max ( dvec3 v0, dvec3 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
Return value.dvec4 Max ( dvec4 v0, dvec4 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
Return value.ivec2 Max ( ivec2 v0, ivec2 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
Return value.ivec3 Max ( ivec3 v0, ivec3 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
Return value.ivec4 Max ( ivec4 v0, ivec4 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
Return value.bvec4 Max ( bvec4 v0, bvec4 v1 ) #
Compares the arguments and returns the maximum value.Arguments
- bvec4 v0 - First value.
- bvec4 v1 - Second value.
Return value
Return value.float Max ( Vector2 v ) #
Compares the argument components and returns the maximum one.Arguments
- Vector2 v - Vector of 2 components.
Return value
Resulting float value.float Max ( Vector3 v ) #
Compares the argument components and returns the maximum one.Arguments
- Vector3 v - Vector of 3 components.
Return value
Resulting float value.float Max ( Vector4 v ) #
Compares the argument components and returns the maximum one.Arguments
- Vector4 v - Vector of 4 components.
Return value
Resulting float value.float Max ( vec2 v ) #
Compares the argument components and returns the maximum one.Arguments
- vec2 v - Vector of 2 components.
Return value
Resulting float value.float Max ( vec3 v ) #
Compares the argument components and returns the maximum one.Arguments
- vec3 v - Vector of 3 components.
Return value
Resulting float value.float Max ( vec4 v ) #
Compares the argument components and returns the maximum one.Arguments
- vec4 v - Vector of 4 components.
Return value
Resulting float value.float Max ( quat v ) #
Compares the argument components and returns the maximum one.Arguments
- quat v - Quaternion.
Return value
Resulting float value.double Max ( dvec2 v ) #
Compares the argument components and returns the maximum one.Arguments
- dvec2 v - Vector of 2 components.
Return value
Resulting double value.double Max ( dvec3 v ) #
Compares the argument components and returns the maximum one.Arguments
- dvec3 v - Vector of 3 components.
Return value
Resulting double value.double Max ( dvec4 v ) #
Compares the argument components and returns the maximum one.Arguments
- dvec4 v - Vector of 4 components.
Return value
Resulting double value.int Max ( ivec2 v ) #
Compares the argument components and returns the maximum one.Arguments
- ivec2 v - Vector of 2 components.
Return value
Resulting int value.int Max ( ivec3 v ) #
Compares the argument components and returns the maximum one.Arguments
- ivec3 v - Vector of 3 components.
Return value
Resulting int value.int Max ( ivec4 v ) #
Compares the argument components and returns the maximum one.Arguments
- ivec4 v - Vector of 4 components.
Return value
Resulting int value.byte Max ( bvec4 v ) #
Compares the argument components and returns the maximum one.Arguments
- bvec4 v - Vector of 4 components.
Return value
Resulting byte value.float Min ( float v0, float v1 ) #
Compares the arguments and returns the minimum value.Arguments
- float v0 - First value.
- float v1 - Second value.
Return value
Resulting float value.double Min ( double v0, double v1 ) #
Compares the arguments and returns the minimum value.Arguments
- double v0 - First value.
- double v1 - Second value.
Return value
Resulting double value.decimal Min ( decimal v0, decimal v1 ) #
Compares the arguments and returns the minimum value.Arguments
- decimal v0 - First value.
- decimal v1 - Second value.
Return value
Resulting decimal value.short Min ( short v0, short v1 ) #
Compares the arguments and returns the minimum value.Arguments
- short v0 - First value.
- short v1 - Second value.
Return value
Resulting short value.ushort Min ( ushort v0, ushort v1 ) #
Compares the arguments and returns the minimum value.Arguments
- ushort v0 - First value.
- ushort v1 - Second value.
Return value
Resulting ushort value.int Min ( int v0, int v1 ) #
Compares the arguments and returns the minimum value.Arguments
- int v0 - First value.
- int v1 - Second value.
Return value
Resulting int value.long Min ( long v0, long v1 ) #
Compares the arguments and returns the minimum value.Arguments
- long v0 - First value.
- long v1 - Second value.
Return value
Resulting long value.ulong Min ( ulong v0, ulong v1 ) #
Compares the arguments and returns the minimum value.Arguments
- ulong v0 - First value.
- ulong v1 - Second value.
Return value
Resulting ulong value.byte Min ( byte v0, byte v1 ) #
Compares the arguments and returns the minimum value.Arguments
- byte v0 - First value.
- byte v1 - Second value.
Return value
Resulting byte value.Vector2 Min ( Vector2 v0, Vector2 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- Vector2 v0 - First value.
- Vector2 v1 - Second value.
Return value
Return value.Vector3 Min ( Vector3 v0, Vector3 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- Vector3 v0 - First value.
- Vector3 v1 - Second value.
Return value
Return value.Vector4 Min ( Vector4 v0, Vector4 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- Vector4 v0 - First value.
- Vector4 v1 - Second value.
Return value
Return value.vec2 Min ( vec2 v0, vec2 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- vec2 v0 - First value.
- vec2 v1 - Second value.
Return value
Return value.vec3 Min ( vec3 v0, vec3 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- vec3 v0 - First value.
- vec3 v1 - Second value.
Return value
Return value.vec4 Min ( vec4 v0, vec4 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- vec4 v0 - First value.
- vec4 v1 - Second value.
Return value
Return value.quat Min ( quat v0, quat v1 ) #
Compares the arguments and returns the minimum value.Arguments
- quat v0 - First value.
- quat v1 - Second value.
Return value
Return value.dvec2 Min ( dvec2 v0, dvec2 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- dvec2 v0 - First value.
- dvec2 v1 - Second value.
Return value
Return value.dvec3 Min ( dvec3 v0, dvec3 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- dvec3 v0 - First value.
- dvec3 v1 - Second value.
Return value
Return value.dvec4 Min ( dvec4 v0, dvec4 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- dvec4 v0 - First value.
- dvec4 v1 - Second value.
Return value
Return value.ivec2 Min ( ivec2 v0, ivec2 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- ivec2 v0 - First value.
- ivec2 v1 - Second value.
Return value
Return value.ivec3 Min ( ivec3 v0, ivec3 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- ivec3 v0 - First value.
- ivec3 v1 - Second value.
Return value
Return value.ivec4 Min ( ivec4 v0, ivec4 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- ivec4 v0 - First value.
- ivec4 v1 - Second value.
Return value
Return value.bvec4 Min ( bvec4 v0, bvec4 v1 ) #
Compares the arguments and returns the minimum value.Arguments
- bvec4 v0 - First value.
- bvec4 v1 - Second value.
Return value
Return value.float Min ( Vector2 v ) #
Compares the argument components and returns the minimum one.Arguments
- Vector2 v - Value.
Return value
Resulting float value.float Min ( Vector3 v ) #
Compares the argument components and returns the minimum one.Arguments
- Vector3 v - Value.
Return value
Resulting float value.float Min ( Vector4 v ) #
Compares the argument components and returns the minimum one.Arguments
- Vector4 v - Value.
Return value
Resulting float value.float Min ( vec2 v ) #
Compares the argument components and returns the minimum one.Arguments
- vec2 v - Value.
Return value
Resulting float value.float Min ( vec3 v ) #
Compares the argument components and returns the minimum one.Arguments
- vec3 v - Value.
Return value
Resulting float value.float Min ( vec4 v ) #
Compares the argument components and returns the minimum one.Arguments
- vec4 v - Value.
Return value
Resulting float value.float Min ( quat v ) #
Compares the argument components and returns the minimum one.Arguments
- quat v - Value.
Return value
Resulting float value.double Min ( dvec2 v ) #
Compares the argument components and returns the minimum one.Arguments
- dvec2 v - Value.
Return value
Resulting double value.double Min ( dvec3 v ) #
Compares the argument components and returns the minimum one.Arguments
- dvec3 v - Value.
Return value
Resulting double value.double Min ( dvec4 v ) #
Compares the argument components and returns the minimum one.Arguments
- dvec4 v - Value.
Return value
Resulting double value.int Min ( ivec2 v ) #
Compares the argument components and returns the minimum one.Arguments
- ivec2 v - Value.
Return value
Resulting int value.int Min ( ivec3 v ) #
Compares the argument components and returns the minimum one.Arguments
- ivec3 v - Value.
Return value
Resulting int value.int Min ( ivec4 v ) #
Compares the argument components and returns the minimum one.Arguments
- ivec4 v - Value.
Return value
Resulting int value.byte Min ( bvec4 v ) #
Compares the argument components and returns the minimum one.Arguments
- bvec4 v - Value.
Return value
Resulting byte value.float Frac ( float v ) #
Returns the fractional part of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Frac ( double v ) #
Returns the fractional part of the argument.Arguments
- double v - Value.
Return value
Resulting double value.decimal Frac ( decimal v ) #
Returns the fractional part of the argument.Arguments
- decimal v - Value.
Return value
Resulting decimal value.Vector2 Frac ( Vector2 v ) #
Returns the fractional part of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Frac ( Vector3 v ) #
Returns the fractional part of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Frac ( Vector4 v ) #
Returns the fractional part of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Frac ( vec2 v ) #
Returns the fractional part of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Frac ( vec3 v ) #
Returns the fractional part of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Frac ( vec4 v ) #
Returns the fractional part of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Frac ( dvec2 v ) #
Returns the fractional part of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Frac ( dvec3 v ) #
Returns the fractional part of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Frac ( dvec4 v ) #
Returns the fractional part of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.float Ceil ( float v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Ceil ( double v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- double v - Value.
Return value
Resulting double value.decimal Ceil ( decimal v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- decimal v - Value.
Return value
Resulting decimal value.Vector2 Ceil ( Vector2 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Ceil ( Vector3 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Ceil ( Vector4 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Ceil ( vec2 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Ceil ( vec3 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Ceil ( vec4 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Ceil ( dvec2 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Ceil ( dvec3 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Ceil ( dvec4 v ) #
Returns the smallest integral value that's greater than or equal to the argument.Arguments
- dvec4 v - Value.
Return value
Return value.int CeilToInt ( float v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- float v - Value.
Return value
Resulting int value.int CeilToInt ( double v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- double v - Value.
Return value
Resulting int value.int CeilToInt ( decimal v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- decimal v - Value.
Return value
Resulting int value.ivec2 CeilToInt ( Vector2 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- Vector2 v - Value.
Return value
Return value.ivec3 CeilToInt ( Vector3 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- Vector3 v - Value.
Return value
Return value.ivec4 CeilToInt ( Vector4 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- Vector4 v - Value.
Return value
Return value.ivec2 CeilToInt ( vec2 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- vec2 v - Value.
Return value
Return value.ivec3 CeilToInt ( vec3 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- vec3 v - Value.
Return value
Return value.ivec4 CeilToInt ( vec4 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- vec4 v - Value.
Return value
Return value.ivec2 CeilToInt ( dvec2 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- dvec2 v - Value.
Return value
Return value.ivec3 CeilToInt ( dvec3 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- dvec3 v - Value.
Return value
Return value.ivec4 CeilToInt ( dvec4 v ) #
Returns the smallest integral value that's greater than or equal to the argument, stored as an integer.Arguments
- dvec4 v - Value.
Return value
Return value.float Floor ( float v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Floor ( double v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- double v - Value.
Return value
Resulting double value.decimal Floor ( decimal v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- decimal v - Value.
Return value
Resulting decimal value.Vector2 Floor ( Vector2 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Floor ( Vector3 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Floor ( Vector4 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Floor ( vec2 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Floor ( vec3 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Floor ( vec4 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Floor ( dvec2 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Floor ( dvec3 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Floor ( dvec4 v ) #
Returns the largest integral value that's less than or equal to the argument.Arguments
- dvec4 v - Value.
Return value
Return value.int FloorToInt ( float v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- float v - Value.
Return value
Resulting int value.int FloorToInt ( double v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- double v - Value.
Return value
Resulting int value.int FloorToInt ( decimal v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- decimal v - Value.
Return value
Resulting int value.ivec2 FloorToInt ( Vector2 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- Vector2 v - Value.
Return value
Return value.ivec3 FloorToInt ( Vector3 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- Vector3 v - Value.
Return value
Return value.ivec4 FloorToInt ( Vector4 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- Vector4 v - Value.
Return value
Return value.ivec2 FloorToInt ( vec2 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- vec2 v - Value.
Return value
Return value.ivec3 FloorToInt ( vec3 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- vec3 v - Value.
Return value
Return value.ivec4 FloorToInt ( vec4 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- vec4 v - Value.
Return value
Return value.ivec2 FloorToInt ( dvec2 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- dvec2 v - Value.
Return value
Return value.ivec3 FloorToInt ( dvec3 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- dvec3 v - Value.
Return value
Return value.ivec4 FloorToInt ( dvec4 v ) #
Returns the largest integral value that's less than or equal to the argument, stored as an integer.Arguments
- dvec4 v - Value.
Return value
Return value.float Truncate ( float v ) #
Returns the integral part of the argument.Arguments
- float v - Value.
Return value
Resulting float value.double Truncate ( double v ) #
Returns the integral part of the argument.Arguments
- double v - Value.
Return value
Resulting double value.decimal Truncate ( decimal v ) #
Returns the integral part of the argument.Arguments
- decimal v - Value.
Return value
Resulting decimal value.Vector2 Truncate ( Vector2 v ) #
Returns the integral part of the argument.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Truncate ( Vector3 v ) #
Returns the integral part of the argument.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Truncate ( Vector4 v ) #
Returns the integral part of the argument.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Truncate ( vec2 v ) #
Returns the integral part of the argument.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Truncate ( vec3 v ) #
Returns the integral part of the argument.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Truncate ( vec4 v ) #
Returns the integral part of the argument.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Truncate ( dvec2 v ) #
Returns the integral part of the argument.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Truncate ( dvec3 v ) #
Returns the integral part of the argument.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Truncate ( dvec4 v ) #
Returns the integral part of the argument.Arguments
- dvec4 v - Value.
Return value
Return value.int TruncateToInt ( float v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- float v - Value.
Return value
Resulting int value.int TruncateToInt ( double v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- double v - Value.
Return value
Resulting int value.int TruncateToInt ( decimal v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- decimal v - Value.
Return value
Resulting int value.ivec2 TruncateToInt ( Vector2 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- Vector2 v - Value.
Return value
Return value.ivec3 TruncateToInt ( Vector3 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- Vector3 v - Value.
Return value
Return value.ivec4 TruncateToInt ( Vector4 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- Vector4 v - Value.
Return value
Return value.ivec2 TruncateToInt ( vec2 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- vec2 v - Value.
Return value
Return value.ivec3 TruncateToInt ( vec3 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- vec3 v - Value.
Return value
Return value.ivec4 TruncateToInt ( vec4 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- vec4 v - Value.
Return value
Return value.ivec2 TruncateToInt ( dvec2 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- dvec2 v - Value.
Return value
Return value.ivec3 TruncateToInt ( dvec3 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- dvec3 v - Value.
Return value
Return value.ivec4 TruncateToInt ( dvec4 v ) #
Returns the integral part of the argument, stored as an integer.Arguments
- dvec4 v - Value.
Return value
Return value.float Round ( float v ) #
Returns an argument rounded to the nearest integral value.Arguments
- float v - Value.
Return value
Resulting float value.double Round ( double v ) #
Returns an argument rounded to the nearest integral value.Arguments
- double v - Value.
Return value
Resulting double value.decimal Round ( decimal v ) #
Returns an argument rounded to the nearest integral value.Arguments
- decimal v - Value.
Return value
Resulting decimal value.Vector2 Round ( Vector2 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- Vector2 v - Value.
Return value
Return value.Vector3 Round ( Vector3 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- Vector3 v - Value.
Return value
Return value.Vector4 Round ( Vector4 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Round ( vec2 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- vec2 v - Value.
Return value
Return value.vec3 Round ( vec3 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- vec3 v - Value.
Return value
Return value.vec4 Round ( vec4 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Round ( dvec2 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Round ( dvec3 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Round ( dvec4 v ) #
Returns an argument rounded to the nearest integral value.Arguments
- dvec4 v - Value.
Return value
Return value.int RoundToInt ( float v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- float v - Value.
Return value
Resulting int value.int RoundToInt ( double v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- double v - Value.
Return value
Resulting int value.int RoundToInt ( decimal v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- decimal v - Value.
Return value
Resulting int value.ivec2 RoundToInt ( Vector2 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- Vector2 v - Value.
Return value
Return value.ivec3 RoundToInt ( Vector3 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- Vector3 v - Value.
Return value
Return value.ivec4 RoundToInt ( Vector4 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- Vector4 v - Value.
Return value
Return value.ivec2 RoundToInt ( vec2 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- vec2 v - Value.
Return value
Return value.ivec3 RoundToInt ( vec3 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- vec3 v - Value.
Return value
Return value.ivec4 RoundToInt ( vec4 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- vec4 v - Value.
Return value
Return value.ivec2 RoundToInt ( dvec2 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- dvec2 v - Value.
Return value
Return value.ivec3 RoundToInt ( dvec3 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- dvec3 v - Value.
Return value
Return value.ivec4 RoundToInt ( dvec4 v ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- dvec4 v - Value.
Return value
Return value.float Round ( float v, int digits, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- float v - Value.
- int digits - The number of fractional digits in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting float value.float Round ( float v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- float v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting float value.float Round ( float v, int digits ) #
Returns an argument rounded to the nearest integral value.Arguments
- float v - Value.
- int digits - The number of fractional digits in the return value.
Return value
Resulting float value.double Round ( double v, int digits, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- double v - Value.
- int digits - The number of fractional digits in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting double value.double Round ( double v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- double v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting double value.double Round ( double v, int digits ) #
Returns an argument rounded to the nearest integral value.Arguments
- double v - Value.
- int digits - The number of fractional digits in the return value.
Return value
Resulting double value.decimal Round ( decimal v, int decimals, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- decimal v - Value.
- int decimals - The number of decimal places in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting decimal value.decimal Round ( decimal v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value.Arguments
- decimal v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting decimal value.decimal Round ( decimal v, int decimals ) #
Returns an argument rounded to the nearest integral value.Arguments
- decimal v - Value.
- int decimals - The number of decimal places in the return value.
Return value
Resulting decimal value.int RoundToInt ( float v, int digits, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- float v - Value.
- int digits - The number of fractional digits in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( float v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- float v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( float v, int digits ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- float v - Value.
- int digits - The number of fractional digits in the return value.
Return value
Resulting int value.int RoundToInt ( double v, int digits, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- double v - Value.
- int digits - The number of fractional digits in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( double v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- double v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( double v, int digits ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- double v - Value.
- int digits - The number of fractional digits in the return value.
Return value
Resulting int value.int RoundToInt ( decimal v, int decimals, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- decimal v - Value.
- int decimals - The number of decimal places in the return value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( decimal v, MidpointRounding mode ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- decimal v - Value.
- MidpointRounding mode - Enum. Specifies the strategy that mathematical rounding methods should use to round a number.
Return value
Resulting int value.int RoundToInt ( decimal v, int decimals ) #
Returns an argument rounded to the nearest integral value, stored as an integer.Arguments
- decimal v - Value.
- int decimals - The number of decimal places in the return value.
Return value
Resulting int value.float Clamp ( float value, float min, float max ) #
Returns the value clamped within the specified min and max limits.Arguments
- float value - Value to be clamped.
- float min - Minimum value (lower limit).
- float max - Maximum value (upper limit).
Return value
Resulting float value.double Clamp ( double value, double min, double max ) #
Returns the value clamped within the specified min and max limits.Arguments
- double value - Value to be clamped.
- double min - Minimum value (lower limit).
- double max - Maximum value (upper limit).
Return value
Resulting double value.decimal Clamp ( decimal value, decimal min, decimal max ) #
Returns the value clamped within the specified min and max limits.Arguments
- decimal value - Value to be clamped.
- decimal min - Minimum value (lower limit).
- decimal max - Maximum value (upper limit).
Return value
Resulting decimal value.int Clamp ( int value, int min, int max ) #
Returns the value clamped within the specified min and max limits.Arguments
- int value - Value to be clamped.
- int min - Minimum value (lower limit).
- int max - Maximum value (upper limit).
Return value
Resulting int value.uint Clamp ( uint value, uint min, uint max ) #
Returns the value clamped within the specified min and max limits.Arguments
- uint value - Value to be clamped.
- uint min - Minimum value (lower limit).
- uint max - Maximum value (upper limit).
Return value
Resulting uint value.long Clamp ( long value, long min, long max ) #
Returns the value clamped within the specified min and max limits.Arguments
- long value - Value to be clamped.
- long min - Minimum value (lower limit).
- long max - Maximum value (upper limit).
Return value
Resulting long value.ulong Clamp ( ulong value, ulong min, ulong max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ulong value - Value to be clamped.
- ulong min - Minimum value (lower limit).
- ulong max - Maximum value (upper limit).
Return value
Resulting ulong value.short Clamp ( short value, short min, short max ) #
Returns the value clamped within the specified min and max limits.Arguments
- short value - Value to be clamped.
- short min - Minimum value (lower limit).
- short max - Maximum value (upper limit).
Return value
Resulting short value.ushort Clamp ( ushort value, ushort min, ushort max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ushort value - Value to be clamped.
- ushort min - Minimum value (lower limit).
- ushort max - Maximum value (upper limit).
Return value
Resulting ushort value.byte Clamp ( byte value, byte min, byte max ) #
Returns the value clamped within the specified min and max limits.Arguments
- byte value - Value to be clamped.
- byte min - Minimum value (lower limit).
- byte max - Maximum value (upper limit).
Return value
Resulting byte value.Vector2 Clamp ( Vector2 value, Vector2 min, Vector2 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- Vector2 value - Value to be clamped.
- Vector2 min - Minimum value (lower limit).
- Vector2 max - Maximum value (upper limit).
Return value
Return value.Vector3 Clamp ( Vector3 value, Vector3 min, Vector3 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- Vector3 value - Value to be clamped.
- Vector3 min - Minimum value (lower limit).
- Vector3 max - Maximum value (upper limit).
Return value
Return value.Vector4 Clamp ( Vector4 value, Vector4 min, Vector4 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- Vector4 value - Value to be clamped.
- Vector4 min - Minimum value (lower limit).
- Vector4 max - Maximum value (upper limit).
Return value
Return value.vec2 Clamp ( vec2 value, vec2 min, vec2 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec2 value - Value to be clamped.
- vec2 min - Minimum value (lower limit).
- vec2 max - Maximum value (upper limit).
Return value
Return value.vec2 Clamp ( vec2 value, float min, float max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec2 value - Value to be clamped.
- float min - Minimum value (lower limit).
- float max - Maximum value (upper limit).
Return value
Return value.dvec2 Clamp ( dvec2 value, dvec2 min, vec2 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec2 value - Value to be clamped.
- dvec2 min - Minimum value (lower limit).
- vec2 max - Maximum value (upper limit).
Return value
Return value.dvec2 Clamp ( dvec2 value, double min, double max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec2 value - Value to be clamped.
- double min - Minimum value (lower limit).
- double max - Maximum value (upper limit).
Return value
Return value.ivec2 Clamp ( ivec2 value, ivec2 min, ivec2 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec2 value - Value to be clamped.
- ivec2 min - Minimum value (lower limit).
- ivec2 max - Maximum value (upper limit).
Return value
Return value.ivec2 Clamp ( ivec2 value, int min, int max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec2 value - Value to be clamped.
- int min - Minimum value (lower limit).
- int max - Maximum value (upper limit).
Return value
Return value.vec3 Clamp ( vec3 value, vec3 min, vec3 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec3 value - Value to be clamped.
- vec3 min - Minimum value (lower limit).
- vec3 max - Maximum value (upper limit).
Return value
Return value.vec3 Clamp ( vec3 value, float min, float max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec3 value - Value to be clamped.
- float min - Minimum value (lower limit).
- float max - Maximum value (upper limit).
Return value
Return value.dvec3 Clamp ( dvec3 value, dvec3 min, dvec3 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec3 value - Value to be clamped.
- dvec3 min - Minimum value (lower limit).
- dvec3 max - Maximum value (upper limit).
Return value
Return value.dvec3 Clamp ( dvec3 value, double min, double max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec3 value - Value to be clamped.
- double min - Minimum value (lower limit).
- double max - Maximum value (upper limit).
Return value
Return value.ivec3 Clamp ( ivec3 value, ivec3 min, ivec3 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec3 value - Value to be clamped.
- ivec3 min - Minimum value (lower limit).
- ivec3 max - Maximum value (upper limit).
Return value
Return value.ivec3 Clamp ( ivec3 value, int min, int max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec3 value - Value to be clamped.
- int min - Minimum value (lower limit).
- int max - Maximum value (upper limit).
Return value
Return value.vec4 Clamp ( vec4 value, vec4 min, vec4 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec4 value - Value to be clamped.
- vec4 min - Minimum value (lower limit).
- vec4 max - Maximum value (upper limit).
Return value
Return value.vec4 Clamp ( vec4 value, float min, float max ) #
Returns the value clamped within the specified min and max limits.Arguments
- vec4 value - Value to be clamped.
- float min - Minimum value (lower limit).
- float max - Maximum value (upper limit).
Return value
Return value.dvec4 Clamp ( dvec4 value, dvec4 min, dvec4 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec4 value - Value to be clamped.
- dvec4 min - Minimum value (lower limit).
- dvec4 max - Maximum value (upper limit).
Return value
Return value.dvec4 Clamp ( dvec4 value, double min, float max ) #
Returns the value clamped within the specified min and max limits.Arguments
- dvec4 value - Value to be clamped.
- double min - Minimum value (lower limit).
- float max - Maximum value (upper limit).
Return value
Return value.ivec4 Clamp ( ivec4 value, ivec4 min, ivec4 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec4 value - Value to be clamped.
- ivec4 min - Minimum value (lower limit).
- ivec4 max - Maximum value (upper limit).
Return value
Return value.ivec4 Clamp ( ivec4 value, int min, int max ) #
Returns the value clamped within the specified min and max limits.Arguments
- ivec4 value - Value to be clamped.
- int min - Minimum value (lower limit).
- int max - Maximum value (upper limit).
Return value
Return value.bvec4 Clamp ( bvec4 value, bvec4 min, bvec4 max ) #
Returns the value clamped within the specified min and max limits.Arguments
- bvec4 value - Value to be clamped.
- bvec4 min - Minimum value (lower limit).
- bvec4 max - Maximum value (upper limit).
Return value
Return value.bvec4 Clamp ( bvec4 value, byte min, byte max ) #
Returns the value clamped within the specified min and max limits.Arguments
- bvec4 value - Value to be clamped.
- byte min - Minimum value (lower limit).
- byte max - Maximum value (upper limit).
Return value
Return value.float Saturate ( float value ) #
Returns the value clamped within the range of [0.0f, 1.0f].Arguments
- float value - Value to be saturated.
Return value
Resulting float value.double Saturate ( double value ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- double value - Value to be saturated.
Return value
Resulting double value.decimal Saturate ( decimal value ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- decimal value - Value to be saturated.
Return value
Resulting decimal value.vec2 Saturate ( Vector2 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- Vector2 v - Value.
Return value
Return value.vec3 Saturate ( Vector3 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- Vector3 v - Value.
Return value
Return value.vec4 Saturate ( Vector4 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- Vector4 v - Value.
Return value
Return value.vec2 Saturate ( vec2 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- vec2 v - Value.
Return value
Return value.vec3 Saturate ( vec3 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- vec3 v - Value.
Return value
Return value.vec4 Saturate ( vec4 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- vec4 v - Value.
Return value
Return value.dvec2 Saturate ( dvec2 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- dvec2 v - Value.
Return value
Return value.dvec3 Saturate ( dvec3 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- dvec3 v - Value.
Return value
Return value.dvec4 Saturate ( dvec4 v ) #
Returns the value clamped within the range of [0.0,1.0].Arguments
- dvec4 v - Value.
Return value
Return value.float Lerp ( float a, float b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- float a - First float value (lower limit of the interpolation range).
- float b - Second float value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting float value.double Lerp ( double a, double b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- double a - First double value (lower limit of the interpolation range).
- double b - Second double value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting double value.decimal Lerp ( decimal a, decimal b, decimal t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- decimal a - First decimal value (lower limit of the interpolation range).
- decimal b - Second decimal value (upper limit of the interpolation range).
- decimal t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting decimal value.int Lerp ( int a, int b, int t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- int a - First int value (lower limit of the interpolation range).
- int b - Second int value (upper limit of the interpolation range).
- int t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting int value.long Lerp ( long a, long b, long t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- long a - First long value (lower limit of the interpolation range).
- long b - Second long value (upper limit of the interpolation range).
- long t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting long value.Vector2 Lerp ( Vector2 a, Vector2 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector2 a - First Vector2 value (lower limit of the interpolation range).
- Vector2 b - Second Vector2 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.Vector3 Lerp ( Vector3 a, Vector3 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector3 a - First Vector3 value (lower limit of the interpolation range).
- Vector3 b - Second Vector3 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.Vector4 Lerp ( Vector4 a, Vector4 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector4 a - First Vector4 value (lower limit of the interpolation range).
- Vector4 b - Second Vector4 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.Vector2 Lerp ( Vector2 a, Vector2 b, Vector2 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector2 a - First Vector2 value (lower limit of the interpolation range).
- Vector2 b - Second Vector2 value (upper limit of the interpolation range).
- Vector2 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.Vector3 Lerp ( Vector3 a, Vector3 b, Vector3 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector3 a - First Vector3 value (lower limit of the interpolation range).
- Vector3 b - Second Vector3 value (upper limit of the interpolation range).
- Vector3 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.Vector4 Lerp ( Vector4 a, Vector4 b, Vector4 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- Vector4 a - First Vector4 value (lower limit of the interpolation range).
- Vector4 b - Second Vector4 value (upper limit of the interpolation range).
- Vector4 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.vec2 Lerp ( vec2 a, vec2 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec2 a - First vec2 value (lower limit of the interpolation range).
- vec2 b - Second vec2 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec3 Lerp ( vec3 a, vec3 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec3 a - First vec3 value (lower limit of the interpolation range).
- vec3 b - Second vec3 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec4 Lerp ( vec4 a, vec4 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec4 a - First vec4 value (lower limit of the interpolation range).
- vec4 b - Second vec4 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec2 Lerp ( vec2 a, vec2 b, vec2 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec2 a - First vec2 value (lower limit of the interpolation range).
- vec2 b - Second vec2 value (upper limit of the interpolation range).
- vec2 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.vec3 Lerp ( vec3 a, vec3 b, vec3 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec3 a - First vec3 value (lower limit of the interpolation range).
- vec3 b - Second vec3 value (upper limit of the interpolation range).
- vec3 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.vec4 Lerp ( vec4 a, vec4 b, vec4 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- vec4 a - First vec4 value (lower limit of the interpolation range).
- vec4 b - Second vec4 value (upper limit of the interpolation range).
- vec4 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec2 Lerp ( dvec2 a, dvec2 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec2 a - First dvec2 value (lower limit of the interpolation range).
- dvec2 b - Second dvec2 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec3 Lerp ( dvec3 a, dvec3 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec3 a - First dvec3 value (lower limit of the interpolation range).
- dvec3 b - Second dvec3 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec4 Lerp ( dvec4 a, dvec4 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec4 a - First dvec4 value (lower limit of the interpolation range).
- dvec4 b - Second dvec4 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec2 Lerp ( dvec2 a, dvec2 b, dvec2 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec2 a - First dvec2 value (lower limit of the interpolation range).
- dvec2 b - Second dvec2 value (upper limit of the interpolation range).
- dvec2 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec3 Lerp ( dvec3 a, dvec3 b, dvec3 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec3 a - First dvec3 value (lower limit of the interpolation range).
- dvec3 b - Second dvec3 value (upper limit of the interpolation range).
- dvec3 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec4 Lerp ( dvec4 a, dvec4 b, dvec4 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dvec4 a - First dvec4 value (lower limit of the interpolation range).
- dvec4 b - Second dvec4 value (upper limit of the interpolation range).
- dvec4 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.mat4 Lerp ( mat4 m0, mat4 m1, float k ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- mat4 m0
- mat4 m1
- float k
Return value
Return value.dmat4 Lerp ( dmat4 m0, dmat4 m1, double k ) #
Returns the interpolated value according to the following formula: a + (b - a) * t.Arguments
- dmat4 m0
- dmat4 m1
- double k
Return value
Return value.float LerpFixed ( float a, float b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- float a - First float value (lower limit of the interpolation range).
- float b - Second float value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting float value.double LerpFixed ( double a, double b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- double a - First double value (lower limit of the interpolation range).
- double b - Second double value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting double value.decimal LerpFixed ( decimal a, decimal b, decimal t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- decimal a - First decimal value (lower limit of the interpolation range).
- decimal b - Second decimal value (upper limit of the interpolation range).
- decimal t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting decimal value.vec2 LerpFixed ( vec2 a, vec2 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec2 a - First vec2 value (lower limit of the interpolation range).
- vec2 b - Second vec2 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec3 LerpFixed ( vec3 a, vec3 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec3 a - First vec3 value (lower limit of the interpolation range).
- vec3 b - Second vec3 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec4 LerpFixed ( vec4 a, vec4 b, float t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec4 a - First vec4 value (lower limit of the interpolation range).
- vec4 b - Second vec4 value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.vec2 LerpFixed ( vec2 a, vec2 b, vec2 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec2 a - First vec2 value (lower limit of the interpolation range).
- vec2 b - Second vec2 value (upper limit of the interpolation range).
- vec2 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.vec3 LerpFixed ( vec3 a, vec3 b, vec3 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec3 a - First vec3 value (lower limit of the interpolation range).
- vec3 b - Second vec3 value (upper limit of the interpolation range).
- vec3 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.vec4 LerpFixed ( vec4 a, vec4 b, vec4 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- vec4 a - First vec4 value (lower limit of the interpolation range).
- vec4 b - Second vec4 value (upper limit of the interpolation range).
- vec4 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec2 LerpFixed ( dvec2 a, dvec2 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec2 a - First dvec2 value (lower limit of the interpolation range).
- dvec2 b - Second dvec2 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec3 LerpFixed ( dvec3 a, dvec3 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec3 a - First dvec3 value (lower limit of the interpolation range).
- dvec3 b - Second dvec3 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec4 LerpFixed ( dvec4 a, dvec4 b, double t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec4 a - First dvec4 value (lower limit of the interpolation range).
- dvec4 b - Second dvec4 value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Return value.dvec2 LerpFixed ( dvec2 a, dvec2 b, dvec2 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec2 a - First dvec2 value (lower limit of the interpolation range).
- dvec2 b - Second dvec2 value (upper limit of the interpolation range).
- dvec2 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec3 LerpFixed ( dvec3 a, dvec3 b, dvec3 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec3 a - First dvec3 value (lower limit of the interpolation range).
- dvec3 b - Second dvec3 value (upper limit of the interpolation range).
- dvec3 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.dvec4 LerpFixed ( dvec4 a, dvec4 b, dvec4 t ) #
Returns the interpolated value according to the following formula: a + (b - a) * t, where the coefficient t is clamped within the range of [0.0,1.0].Arguments
- dvec4 a - First dvec4 value (lower limit of the interpolation range).
- dvec4 b - Second dvec4 value (upper limit of the interpolation range).
- dvec4 t - Interpolation coefficient used to interpolate a value between a and b(componentwise).
Return value
Return value.float LerpAngle ( float a, float b, float t ) #
Returns the interpolated angle value according to the following formula: a + (b - a) * t, where the coefficient is clamped within the range of [0.0,1.0].Arguments
- float a - First float value (lower limit of the interpolation range).
- float b - Second float value (upper limit of the interpolation range).
- float t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting float value.double LerpAngle ( double a, double b, double t ) #
Returns the interpolated angle value according to the following formula: a + (b - a) * t, where the coefficient is clamped within the range of [0.0,1.0].Arguments
- double a - First double value (lower limit of the interpolation range).
- double b - Second double value (upper limit of the interpolation range).
- double t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting double value.decimal LerpAngle ( decimal a, decimal b, decimal t ) #
Returns the interpolated angle value according to the following formula: a + (b - a) * t, where the coefficient is clamped within the range of [0.0,1.0].Arguments
- decimal a - First decimal value (lower limit of the interpolation range).
- decimal b - Second decimal value (upper limit of the interpolation range).
- decimal t - Interpolation coefficient used to interpolate a value between a and b.
Return value
Resulting decimal value.float InverseLerp ( float a, float b, float value ) #
Returns the value calculated according to the following formula: (value - a) / (b - a) clamped within the range of [0.0,1.0].Arguments
- float a - First float value (lower limit of the interpolation range).
- float b - Second float value (upper limit of the interpolation range).
- float value - Value.
Return value
Resulting float value.double InverseLerp ( double a, double b, double value ) #
Returns the value calculated according to the following formula: (value - a) / (b - a) clamped within the range of [0.0,1.0].Arguments
- double a - First double value (lower limit of the interpolation range).
- double b - Second double value (upper limit of the interpolation range).
- double value - Value.
Return value
Resulting double value.decimal InverseLerp ( decimal a, decimal b, decimal value ) #
Returns the value calculated according to the following formula: (value - a) / (b - a) clamped within the range of [0.0,1.0].Arguments
- decimal a - First decimal value (lower limit of the interpolation range).
- decimal b - Second decimal value (upper limit of the interpolation range).
- decimal value - Value.
Return value
Resulting decimal value.quat Slerp ( quat q0, quat q1, float k ) #
Spherical interpolation between two given quaternions.Arguments
- quat q0
- quat q1
- float k
Return value
Return value.float Dot ( Vector2 v0, Vector2 v1 ) #
Returns the dot product of two vectors.Arguments
- Vector2 v0 - First vector.
- Vector2 v1 - Second vector.
Return value
Resulting float value.float Dot ( Vector3 v0, Vector3 v1 ) #
Returns the dot product of two vectors.Arguments
- Vector3 v0 - First vector.
- Vector3 v1 - Second vector.
Return value
Resulting float value.float Dot ( Vector4 v0, Vector4 v1 ) #
Returns the dot product of two vectors.Arguments
- Vector4 v0 - First vector.
- Vector4 v1 - Second vector.
Return value
Resulting float value.float Dot ( vec2 v0, vec2 v1 ) #
Returns the dot product of two vectors.Arguments
- vec2 v0 - First vector.
- vec2 v1 - Second vector.
Return value
Resulting float value.float Dot ( vec3 v0, vec3 v1 ) #
Returns the dot product of two vectors.Arguments
- vec3 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Resulting float value.float Dot ( vec4 v0, vec4 v1 ) #
Returns the dot product of two vectors.Arguments
- vec4 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Resulting float value.float Dot ( quat v0, quat v1 ) #
Returns the dot product of two vectors.Arguments
- quat v0 - First vector.
- quat v1 - Second vector.
Return value
Resulting float value.double Dot ( dvec2 v0, dvec2 v1 ) #
Returns the dot product of two vectors.Arguments
- dvec2 v0 - First vector.
- dvec2 v1 - Second vector.
Return value
Resulting double value.double Dot ( dvec3 v0, dvec3 v1 ) #
Returns the dot product of two vectors.Arguments
- dvec3 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Resulting double value.double Dot ( dvec4 v0, dvec4 v1 ) #
Returns the dot product of two vectors.Arguments
- dvec4 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Resulting double value.int Dot ( ivec2 v0, ivec2 v1 ) #
Returns the dot product of two vectors.Arguments
- ivec2 v0 - First vector.
- ivec2 v1 - Second vector.
Return value
Resulting int value.int Dot ( ivec3 v0, ivec3 v1 ) #
Returns the dot product of two vectors.Arguments
- ivec3 v0 - First vector.
- ivec3 v1 - Second vector.
Return value
Resulting int value.int Dot ( ivec4 v0, ivec4 v1 ) #
Returns the dot product of two vectors.Arguments
- ivec4 v0 - First vector.
- ivec4 v1 - Second vector.
Return value
Resulting int value.int Dot ( bvec4 v0, bvec4 v1 ) #
Returns the dot product of two vectors.Arguments
- bvec4 v0 - First vector.
- bvec4 v1 - Second vector.
Return value
Resulting int value.float Dot ( vec3 v0, vec4 v1 ) #
Returns the dot product of two vectors.Arguments
- vec3 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Resulting float value.float Dot ( vec4 v0, vec3 v1 ) #
Returns the dot product of two vectors.Arguments
- vec4 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Resulting float value.double Dot ( dvec3 v0, dvec4 v1 ) #
Returns the dot product of two vectors.Arguments
- dvec3 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Resulting double value.double Dot ( dvec4 v0, dvec3 v1 ) #
Returns the dot product of two vectors.Arguments
- dvec4 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Resulting double value.float Dot3 ( vec3 v0, vec4 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- vec3 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Resulting float value.float Dot3 ( vec4 v0, vec3 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- vec4 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Resulting float value.float Dot3 ( vec4 v0, vec4 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- vec4 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Resulting float value.double Dot3 ( dvec3 v0, dvec4 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- dvec3 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Resulting double value.double Dot3 ( dvec4 v0, dvec3 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- dvec4 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Resulting double value.double Dot3 ( dvec4 v0, dvec4 v1 ) #
Returns the dot product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- dvec4 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Resulting double value.float Sum ( Vector2 v ) #
Returns the sum of vector components.Arguments
- Vector2 v - Vector.
Return value
Resulting float value.float Sum ( Vector3 v ) #
Returns the sum of vector components.Arguments
- Vector3 v - Vector.
Return value
Resulting float value.float Sum ( Vector4 v ) #
Returns the sum of vector components.Arguments
- Vector4 v - Vector.
Return value
Resulting float value.float Sum ( vec2 v ) #
Returns the sum of vector components.Arguments
- vec2 v - Vector.
Return value
Resulting float value.float Sum ( vec3 v ) #
Returns the sum of vector components.Arguments
- vec3 v - Vector.
Return value
Resulting float value.float Sum ( vec4 v ) #
Returns the sum of vector components.Arguments
- vec4 v - Vector.
Return value
Resulting float value.float Sum ( quat v ) #
Returns the sum of vector components.Arguments
- quat v - Vector.
Return value
Resulting float value.double Sum ( dvec2 v ) #
Returns the sum of vector components.Arguments
- dvec2 v - Vector.
Return value
Resulting double value.double Sum ( dvec3 v ) #
Returns the sum of vector components.Arguments
- dvec3 v - Vector.
Return value
Resulting double value.double Sum ( dvec4 v ) #
Returns the sum of vector components.Arguments
- dvec4 v - Vector.
Return value
Resulting double value.int Sum ( ivec2 v ) #
Returns the sum of vector components.Arguments
- ivec2 v - Vector.
Return value
Resulting int value.int Sum ( ivec3 v ) #
Returns the sum of vector components.Arguments
- ivec3 v - Vector.
Return value
Resulting int value.int Sum ( ivec4 v ) #
Returns the sum of vector components.Arguments
- ivec4 v - Vector.
Return value
Resulting int value.int Sum ( bvec4 v ) #
Returns the sum of vector components.Arguments
- bvec4 v - Vector.
Return value
Resulting int value.float Length2 ( Vector2 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- Vector2 v - Vector.
Return value
Resulting float value.float Length2 ( Vector3 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- Vector3 v - Vector.
Return value
Resulting float value.float Length2 ( Vector4 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- Vector4 v - Vector.
Return value
Resulting float value.float Length2 ( vec2 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- vec2 v - Vector.
Return value
Resulting float value.float Length2 ( vec3 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- vec3 v - Vector.
Return value
Resulting float value.float Length2 ( vec4 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- vec4 v - Vector.
Return value
Resulting float value.float Length2 ( quat v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- quat v - Vector.
Return value
Resulting float value.double Length2 ( dvec2 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- dvec2 v - Vector.
Return value
Resulting double value.double Length2 ( dvec3 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- dvec3 v - Vector.
Return value
Resulting double value.double Length2 ( dvec4 v ) #
Returns the squared length of a given vector. This method is much faster than Length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- dvec4 v - Vector.
Return value
Resulting double value.int Length2 ( ivec2 v ) #
Returns the squared length of a given vector. This method is much faster than length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- ivec2 v - Vector.
Return value
Resulting int value.int Length2 ( ivec3 v ) #
Returns the squared length of a given vector. This method is much faster than length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- ivec3 v - Vector.
Return value
Resulting int value.int Length2 ( ivec4 v ) #
Returns the squared length of a given vector. This method is much faster than length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- ivec4 v - Vector.
Return value
Resulting int value.int Length2 ( bvec4 v ) #
Returns the squared length of a given vector. This method is much faster than length() — the calculation is basically the same only without the slow Sqrt call. If you are using lengths simply to compare distances, then it is faster to compare squared lengths against the squares of distances as the comparison gives the same result.Arguments
- bvec4 v - Vector.
Return value
Resulting int value.float Length ( Vector2 v ) #
Returns the length of a given vector.Arguments
- Vector2 v - Vector.
Return value
Resulting float value.float Length ( Vector3 v ) #
Returns the length of a given vector.Arguments
- Vector3 v - Vector.
Return value
Resulting float value.float Length ( Vector4 v ) #
Returns the length of a given vector.Arguments
- Vector4 v - Vector.
Return value
Resulting float value.float Length ( vec2 v ) #
Returns the length of a given vector.Arguments
- vec2 v - Vector.
Return value
Resulting float value.float Length ( vec3 v ) #
Returns the length of a given vector.Arguments
- vec3 v - Vector.
Return value
Resulting float value.float Length ( vec4 v ) #
Returns the length of a given vector.Arguments
- vec4 v - Vector.
Return value
Resulting float value.float Length ( quat v ) #
Returns the length of a given vector.Arguments
- quat v - Vector.
Return value
Resulting float value.double Length ( dvec2 v ) #
Returns the length of a given vector.Arguments
- dvec2 v - Vector.
Return value
Resulting double value.double Length ( dvec3 v ) #
Returns the length of a given vector.Arguments
- dvec3 v - Vector.
Return value
Resulting double value.double Length ( dvec4 v ) #
Returns the length of a given vector.Arguments
- dvec4 v - Vector.
Return value
Resulting double value.float ILength ( Vector2 v ) #
Returns the inverted length of a given vector.Arguments
- Vector2 v - Vector.
Return value
Resulting float value.float ILength ( Vector3 v ) #
Returns the inverted length of a given vector.Arguments
- Vector3 v - Vector.
Return value
Resulting float value.float ILength ( Vector4 v ) #
Returns the inverted length of a given vector.Arguments
- Vector4 v - Vector.
Return value
Resulting float value.float ILength ( vec2 v ) #
Returns the inverted length of a given vector.Arguments
- vec2 v - Vector.
Return value
Resulting float value.float ILength ( vec3 v ) #
Returns the inverted length of a given vector.Arguments
- vec3 v - Vector.
Return value
Resulting float value.float ILength ( vec4 v ) #
Returns the inverted length of a given vector.Arguments
- vec4 v - Vector.
Return value
Resulting float value.float ILength ( quat v ) #
Returns the inverted length of a given vector.Arguments
- quat v - Vector.
Return value
Resulting float value.double ILength ( dvec2 v ) #
Returns the inverted length of a given vector.Arguments
- dvec2 v - Vector.
Return value
Resulting double value.double ILength ( dvec3 v ) #
Returns the inverted length of a given vector.Arguments
- dvec3 v - Vector.
Return value
Resulting double value.double ILength ( dvec4 v ) #
Returns the inverted length of a given vector.Arguments
- dvec4 v - Vector.
Return value
Resulting double value.float Distance2 ( Vector2 v0, Vector2 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors.Arguments
- Vector2 v0 - Coordinates of the first point/vector.
- Vector2 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance2 ( Vector3 v0, Vector3 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors.Arguments
- Vector3 v0 - Coordinates of the first point/vector.
- Vector3 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance2 ( Vector4 v0, Vector4 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors.Arguments
- Vector4 v0 - Coordinates of the first point/vector.
- Vector4 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance2 ( vec2 v0, vec2 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- vec2 v0 - Coordinates of the first point/vector.
- vec2 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance2 ( vec3 v0, vec3 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- vec3 v0 - Coordinates of the first point/vector.
- vec3 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance2 ( vec4 v0, vec4 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- vec4 v0 - Coordinates of the first point/vector.
- vec4 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.double Distance2 ( dvec2 v0, dvec2 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- dvec2 v0 - Coordinates of the first point/vector.
- dvec2 v1 - Coordinates of the second point/vector.
Return value
Resulting double value.double Distance2 ( dvec3 v0, dvec3 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- dvec3 v0 - Coordinates of the first point/vector.
- dvec3 v1 - Coordinates of the second point/vector.
Return value
Resulting double value.double Distance2 ( dvec4 v0, dvec4 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- dvec4 v0 - Coordinates of the first point/vector.
- dvec4 v1 - Coordinates of the second point/vector.
Return value
Resulting double value.int Distance2 ( ivec2 v0, ivec2 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- ivec2 v0 - Coordinates of the first point/vector.
- ivec2 v1 - Coordinates of the second point/vector.
Return value
Resulting int value.int Distance2 ( ivec3 v0, ivec3 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- ivec3 v0 - Coordinates of the first point/vector.
- ivec3 v1 - Coordinates of the second point/vector.
Return value
Resulting int value.int Distance2 ( ivec4 v0, ivec4 v1 ) #
Returns the squared Euclidean distance between the two given points/vectors. The squared distance is calculated as: Length2(v0 - v1).Arguments
- ivec4 v0 - Coordinates of the first point/vector.
- ivec4 v1 - Coordinates of the second point/vector.
Return value
Resulting int value.float Distance ( Vector2 v0, Vector2 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- Vector2 v0 - Coordinates of the first point/vector.
- Vector2 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance ( Vector3 v0, Vector3 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- Vector3 v0 - Coordinates of the first point/vector.
- Vector3 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance ( Vector4 v0, Vector4 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- Vector4 v0 - Coordinates of the first point/vector.
- Vector4 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance ( vec2 v0, vec2 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- vec2 v0 - Coordinates of the first point/vector.
- vec2 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance ( vec3 v0, vec3 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- vec3 v0 - Coordinates of the first point/vector.
- vec3 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.float Distance ( vec4 v0, vec4 v1 ) #
Returns the Euclidean distance between the two given points/vectors. The distance is calculated as: Length(v0 - v1).Arguments
- vec4 v0 - Coordinates of the first point/vector.
- vec4 v1 - Coordinates of the second point/vector.
Return value
Resulting float value.double Distance ( dvec2 v0, dvec2 v1 ) #
Returns the Euclidean distance between the two given points. The distance is calculated as: Length(v0 - v1).Arguments
- dvec2 v0 - Coordinates of the first point.
- dvec2 v1 - Coordinates of the second point.
Return value
Resulting double value.double Distance ( dvec3 v0, dvec3 v1 ) #
Returns the Euclidean distance between the two given points. The distance is calculated as: Length(v0 - v1).Arguments
- dvec3 v0 - Coordinates of the first point.
- dvec3 v1 - Coordinates of the second point.
Return value
Resulting double value.double Distance ( dvec4 v0, dvec4 v1 ) #
Returns the Euclidean distance between the two given points. The distance is calculated as: Length(v0 - v1).Arguments
- dvec4 v0 - Coordinates of the first point.
- dvec4 v1 - Coordinates of the second point.
Return value
Resulting double value.vec2 ClampLength ( vec2 vector, float max_length ) #
Returns the vector clamped to the maximum length.Arguments
- vec2 vector - Source vector.
- float max_length - Maximum length.
Return value
Return vector.vec3 ClampLength ( vec3 vector, float max_length ) #
Returns the vector clamped to the maximum length.Arguments
- vec3 vector - Source vector.
- float max_length - Maximum length.
Return value
Return vector.vec4 ClampLength ( vec4 vector, float max_length ) #
Returns the vector clamped to the maximum length.Arguments
- vec4 vector - Source vector.
- float max_length - Maximum length.
Return value
Return vector.dvec2 ClampLength ( dvec2 vector, float max_length ) #
Returns the vector clamped to the maximum length.Arguments
- dvec2 vector - Source vector.
- float max_length - Maximum length.
Return value
Return vector.dvec3 ClampLength ( dvec3 vector, double max_length ) #
Returns the vector clamped to the maximum length.Arguments
- dvec3 vector - Source vector.
- double max_length - Maximum length.
Return value
Return vector.dvec4 ClampLength ( dvec4 vector, double max_length ) #
Returns the vector clamped to the maximum length.Arguments
- dvec4 vector - Source vector.
- double max_length - Maximum length.
Return value
Return vector.Vector2 Normalize ( Vector2 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- Vector2 value - Value to be normalized.
Return value
Return value.Vector3 Normalize ( Vector3 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- Vector3 value - Value to be normalized.
Return value
Return value.Vector4 Normalize ( Vector4 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- Vector4 value - Value to be normalized.
Return value
Return value.vec2 Normalize ( vec2 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- vec2 value - Value to be normalized.
Return value
Return value.vec3 Normalize ( vec3 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- vec3 value - Value to be normalized.
Return value
Return value.vec4 Normalize ( vec4 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- vec4 value - Value to be normalized.
Return value
Return value.quat Normalize ( quat value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- quat value - Value to be normalized.
Return value
Return value.dvec2 Normalize ( dvec2 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- dvec2 value - Value to be normalized.
Return value
Return value.dvec3 Normalize ( dvec3 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- dvec3 value - Value to be normalized.
Return value
Return value.dvec4 Normalize ( dvec4 value ) #
Returns a vector with the same direction as the specified vector, but with a length of 1.Arguments
- dvec4 value - Value to be normalized.
Return value
Return value.Vector2 Project ( Vector2 vector, Vector2 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- Vector2 vector - Vector of 2 components.
- Vector2 on_normal - Normal.
Return value
Projection of the input vector onto the normal.Vector3 Project ( Vector3 vector, Vector3 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- Vector3 vector - Vector of 3 components.
- Vector3 on_normal - Normal.
Return value
Projection of the input vector onto the normal.Vector4 Project ( Vector4 vector, Vector4 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- Vector4 vector - Vector of 4 components.
- Vector4 on_normal - Normal.
Return value
Projection of the input vector onto the normal.vec2 Project ( vec2 vector, vec2 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- vec2 vector - Vector.
- vec2 on_normal - Normal.
Return value
Projection of the input vector onto the normal.vec3 Project ( vec3 vector, vec3 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- vec3 vector - Vector.
- vec3 on_normal - Normal.
Return value
Projection of the input vector onto the normal.vec4 Project ( vec4 vector, vec4 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- vec4 vector - Vector.
- vec4 on_normal - Normal.
Return value
Projection of the input vector onto the normal.dvec2 Project ( dvec2 vector, dvec2 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- dvec2 vector - Vector.
- dvec2 on_normal - Normal.
Return value
Projection of the input vector onto the normal.dvec3 Project ( dvec3 vector, dvec3 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- dvec3 vector - Vector.
- dvec3 on_normal - Normal.
Return value
Projection of the input vector onto the normal.dvec4 Project ( dvec4 vector, dvec4 on_normal ) #
Calculates the projection of a vector onto a given normal.Arguments
- dvec4 vector - Vector.
- dvec4 on_normal - Normal.
Return value
Projection of the input vector onto the normal.vec3 ProjectOnPlane ( vec3 vector, vec3 plane_normal ) #
Calculates the projection of a vector onto a given plane.Arguments
- vec3 vector - Vector.
- vec3 plane_normal - Normal to the plane.
Return value
Projection of the input vector onto the plane.Vector3 Cross ( Vector3 v0, Vector3 v1 ) #
Returns the cross product of two vectors.Arguments
- Vector3 v0 - First vector.
- Vector3 v1 - Second vector.
Return value
Cross product of two vectors.vec3 Cross ( vec3 v0, vec3 v1 ) #
Returns the cross product of two vectors.Arguments
- vec3 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Cross product of two vectors.dvec3 Cross ( dvec3 v0, dvec3 v1 ) #
Returns the cross product of two vectors.Arguments
- dvec3 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Cross product of two vectors.ivec3 Cross ( ivec3 v0, ivec3 v1 ) #
Returns the cross product of two vectors.Arguments
- ivec3 v0 - First vector.
- ivec3 v1 - Second vector.
Return value
Cross product of two vectors.vec3 Cross3 ( vec4 v0, vec4 v1 ) #
Returns the cross product of three components of vectors. The W component of four-component vectors is ignored.Arguments
- vec4 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Cross product.vec3 Cross3 ( vec4 v0, vec3 v1 ) #
Returns the cross product of three components of vectors. The W component of the four-component vector is ignored.Arguments
- vec4 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Cross product.vec3 Cross3 ( vec3 v0, vec4 v1 ) #
Returns the cross product of three components of vectors. The W component of the four-component vector is ignored.Arguments
- vec3 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Cross product.Vector2 Reflect ( Vector2 v0, Vector2 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- Vector2 v0 - Source vector.
- Vector2 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.Vector3 Reflect ( Vector3 v0, Vector3 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- Vector3 v0 - Source vector.
- Vector3 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.vec2 Reflect ( vec2 v0, vec2 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- vec2 v0 - Source vector.
- vec2 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.vec3 Reflect ( vec3 v0, vec3 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- vec3 v0 - Source vector.
- vec3 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.dvec2 Reflect ( dvec2 v0, dvec2 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- dvec2 v0 - Source vector.
- dvec2 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.dvec3 Reflect ( dvec3 v0, dvec3 v1 ) #
Returns the reflection of a vector off a surface that has the specified normal.Arguments
- dvec3 v0 - Source vector.
- dvec3 v1 - The normal of the surface being reflected off.
Return value
Reflected vector.bool AreCollinear ( Vector3 v0, Vector3 v1 ) #
Checks if the vectors are collinear.Arguments
- Vector3 v0 - First vector.
- Vector3 v1 - Second vector.
Return value
true if the vectors are collinear; otherwise, false.bool AreCollinear ( vec3 v0, vec3 v1 ) #
Checks if the vectors are collinear.Arguments
- vec3 v0 - First vector.
- vec3 v1 - Second vector.
Return value
true if the vectors are collinear; otherwise, false.bool AreCollinear ( dvec3 v0, dvec3 v1 ) #
Checks if the vectors are collinear.Arguments
- dvec3 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
true if the vectors are collinear; otherwise, false.float Angle ( Vector2 from, Vector2 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- Vector2 from - First vector (from which the angular difference is measured).
- Vector2 to - Second vector (to which the angular difference is measured).
Return value
Resulting float value.float Angle ( Vector3 from, Vector3 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- Vector3 from - First vector (from which the angular difference is measured).
- Vector3 to - Second vector (to which the angular difference is measured).
Return value
Resulting float value.float Angle ( vec2 from, vec2 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- vec2 from - First vector (from which the angular difference is measured).
- vec2 to - Second vector (to which the angular difference is measured).
Return value
Resulting float value.float Angle ( vec3 from, vec3 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- vec3 from - First vector (from which the angular difference is measured).
- vec3 to - Second vector (to which the angular difference is measured).
Return value
Resulting float value.double Angle ( dvec2 from, dvec2 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- dvec2 from - First vector (from which the angular difference is measured).
- dvec2 to - Second vector (to which the angular difference is measured).
Return value
Resulting double value.double Angle ( dvec3 from, dvec3 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- dvec3 from - First vector (from which the angular difference is measured).
- dvec3 to - Second vector (to which the angular difference is measured).
Return value
Resulting double value.float Angle ( quat q0, quat q1 ) #
Returns the angle (in degrees) between the specified arguments. The angle returned is the unsigned acute angle between the two arguments. This means the smaller of the two possible angles is used.Arguments
- quat q0 - First quaternion.
- quat q1 - Second quaternion.
Return value
Resulting float value.float Angle ( quat q, vec3 axis ) #
Returns the angle (in degrees) between the specified arguments. The angle returned is the unsigned acute angle between the two arguments. This means the smaller of the two possible angles is used.Arguments
- quat q - Quaternion.
- vec3 axis - Axis of rotation.
Return value
Resulting float value.float Angle ( vec3 v0, vec3 v1, vec3 up ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the unsigned acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- vec3 v0 - First vector (from which the angular difference is measured).
- vec3 v1 - Second vector (to which the angular difference is measured).
- vec3 up - Direction of the UP-vector.
Return value
Resulting float value.float AngleSigned ( vec2 from, vec2 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the signed acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- vec2 from - First vector (from which the angular difference is measured).
- vec2 to - Second vector (to which the angular difference is measured).
Return value
Resulting float value.float AngleSigned ( vec3 from, vec3 to, vec3 axis ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the signed acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- vec3 from - First vector (from which the angular difference is measured).
- vec3 to - Second vector (to which the angular difference is measured).
- vec3 axis - Axis of rotation.
Return value
Resulting float value.double AngleSigned ( dvec2 from, dvec2 to ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the signed acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- dvec2 from - First vector (from which the angular difference is measured).
- dvec2 to - Second vector (to which the angular difference is measured).
Return value
Resulting double value.double AngleSigned ( dvec3 from, dvec3 to, vec3 axis ) #
Returns the angle (in degrees) between the specified vectors. The angle returned is the signed acute angle between the two vectors. This means the smaller of the two possible angles is used.Arguments
- dvec3 from - First vector (from which the angular difference is measured).
- dvec3 to - Second vector (to which the angular difference is measured).
- vec3 axis - Axis of rotation.
Return value
Resulting double value.float Min ( float[] values ) #
Compares the argument components and returns the minimum value.Arguments
- float[] values - Array of values.
Return value
Resulting float value.double Min ( double[] values ) #
Compares the arguments and returns the minimum value.Arguments
- double[] values - Array of values.
Return value
Resulting double value.int Min ( int[] values ) #
Compares the arguments and returns the minimum value.Arguments
- int[] values - Array of values.
Return value
Resulting int value.long Min ( long[] values ) #
Compares the arguments and returns the minimum value.Arguments
- long[] values - Array of values.
Return value
Resulting long value.float Max ( float[] values ) #
Compares the arguments and returns the maximum value.Arguments
- float[] values - Array of values.
Return value
Resulting float value.double Max ( double[] values ) #
Compares the arguments and returns the maximum value.Arguments
- double[] values - Array of values.
Return value
Resulting double value.int Max ( int[] values ) #
Compares the arguments and returns the maximum value.Arguments
- int[] values - Array of values.
Return value
Resulting int value.long Max ( long[] values ) #
Compares the arguments and returns the maximum value.Arguments
- long[] values - Array of values.
Return value
Resulting long value.float Bezier ( float[] times, float[] values, float time ) #
Calculates the value of a cubic Bezier function for t = time.
A cubic Bezier curve is represented by 4 points. Po is the start point, P1 and P2 are control points 1 and 2 and P3 is the end point. The start and end point denote the beginning and end points of the path and the control points determine how the path moves from the start to the finish. As can be seen from the image, the only variable changing is t which determines how far the path has progressed from P0 to P3. Cubic Bezier curves are used as timing functions particularly for keyframe interpolation.
Arguments
- float[] times - Coordinates of the four points of the curve along the horizontal T (times) axis in the range [0.0f, 1.0f].
- float[] values - Coordinates of the four points of the curve along the vertical V (values) axis in the range [0.0f, 1.0f].
- float time - Time in the range [0, 1], for which the value of the Bezier function is to be calculated.
Return value
Value of the Bezier function.double Bezier ( double[] times, double[] values, double time ) #
Calculates the value of a cubic Bezier function for t = time.
A cubic Bezier curve is represented by 4 points. Po is the start point, P1 and P2 are control points 1 and 2 and P3 is the end point. The start and end point denote the beginning and end points of the path and the control points determine how the path moves from the start to the finish. As can be seen from the image, the only variable changing is t which determines how far the path has progressed from P0 to P3. Cubic Bezier curves are used as timing functions particularly for keyframe interpolation.
Arguments
- double[] times - Coordinates of the four points of the curve along the horizontal T (times) axis in the range [0.0f, 1.0f].
- double[] values - Coordinates of the four points of the curve along the vertical V (values) axis in the range [0.0f, 1.0f].
- double time - Time in the range [0, 1], for which the value of the Bezier function is to be calculated.
Return value
Value of the Bezier function.float Repeat ( float t, float length ) #
Returns the t value as repeated (looped) within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- float t - A value along the horizontal T (times) axis.
- float length - Segment length along the horizontal T (times) axis.
Return value
Resulting float value.double Repeat ( double t, double length ) #
Returns the t value as repeated (looped) within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- double t - A value along the horizontal T (times) axis.
- double length - Segment length along the horizontal T (times) axis.
Return value
Resulting double value.decimal Repeat ( decimal t, decimal length ) #
Returns the t value as repeated (looped) within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- decimal t - A value along the horizontal T (times) axis.
- decimal length - Segment length along the horizontal T (times) axis.
Return value
Resulting decimal value.float PingPong ( float t, float length ) #
Returns the t value as repeated forth and back within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- float t - A value along the horizontal T (times) axis.
- float length - Segment length along the horizontal T (times) axis.
Return value
Resulting float value.double PingPong ( double t, double length ) #
Returns the t value as repeated forth and back within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- double t - A value along the horizontal T (times) axis.
- double length - Segment length along the horizontal T (times) axis.
Return value
Resulting double value.decimal PingPong ( decimal t, decimal length ) #
Returns the t value as repeated forth and back within the specified segment. Thus, this value is never less than 0 or greater than the length value.Arguments
- decimal t - A value along the horizontal T (times) axis.
- decimal length - Segment length along the horizontal T (times) axis.
Return value
Resulting decimal value.float DeltaAngle ( float current, float target ) #
Calculates the smaller difference between the two argument angles, in degrees.Arguments
- float current - Current angle, in degrees.
- float target - Target angle, in degrees.
Return value
Difference between the two argument angles, in degrees.double DeltaAngle ( double current, double target ) #
Calculates the smaller difference between the two argument angles, in degrees.Arguments
- double current - Current angle, in degrees.
- double target - Target angle, in degrees.
Return value
Difference between the two argument angles, in degrees.decimal DeltaAngle ( decimal current, decimal target ) #
Calculates the smaller difference between the two argument angles, in degrees.Arguments
- decimal current - Current angle, in degrees.
- decimal target - Target angle, in degrees.
Return value
Difference between the two argument angles, in degrees.float MoveTowards ( float current, float target, float max_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- float current - Current value.
- float target - Target value.
- float max_delta - Maximum delta value, maximum possible change from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting float value.double MoveTowards ( double current, double target, double max_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- double current - Current value.
- double target - Target value.
- double max_delta - Maximum delta value, maximum possible change from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting double value.vec2 MoveTowards ( vec2 current, vec2 target, float max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- vec2 current - Current value.
- vec2 target - Target value.
- float max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.vec3 MoveTowards ( vec3 current, vec3 target, float max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- vec3 current - Current value.
- vec3 target - Target value.
- float max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.vec4 MoveTowards ( vec4 current, vec4 target, float max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- vec4 current - Current value.
- vec4 target - Target value.
- float max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.dvec2 MoveTowards ( dvec2 current, dvec2 target, double max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- dvec2 current - Current value.
- dvec2 target - Target value.
- double max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.dvec3 MoveTowards ( dvec3 current, dvec3 target, double max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- dvec3 current - Current value.
- dvec3 target - Target value.
- double max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.dvec4 MoveTowards ( dvec4 current, dvec4 target, double max_distance_delta ) #
Moves the current value towards the target value by the maximum delta value. The result is limited by the target value and cannot move beyond it.Arguments
- dvec4 current - Current value.
- dvec4 target - Target value.
- double max_distance_delta - Maximum delta value, maximum possible distance from the current to the target value. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting value.float MoveTowardsAngle ( float current, float target, float max_delta ) #
Rotates the current angle towards the target angle by the maximum delta value. The result is limited by the target angle and cannot move beyond it.Arguments
- float current - Current angle, in degrees.
- float target - Target angle, in degrees.
- float max_delta - Maximum delta value, maximum possible change from the current to the target angle. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting float value.double MoveTowardsAngle ( double current, double target, double max_delta ) #
Rotates the current angle towards the target angle by the maximum delta value. The result is limited by the target angle and cannot move beyond it.Arguments
- double current - Current angle, in degrees.
- double target - Target angle, in degrees.
- double max_delta - Maximum delta value, maximum possible change from the current to the target angle. Negative values move the resulting value to the opposite direction from the target.
Return value
Resulting double value.quat RotateTowards ( quat source, quat target, float max_angle ) #
Rotates the source quaternion towards the target quaternion by an angular step of max_angle (note, that the rotation will not overshoot).Arguments
- quat source - Source quaternion.
- quat target - Target quaternion.
- float max_angle - Angular step, in degrees. If a negative value is specified, 0 will be used instead.
Return value
Resulting quaternion.vec3 RotateTowards ( vec3 source, vec3 target, float max_angle ) #
Rotates the source vector towards the target vector by an angular step of max_angle (note, that the rotation will not overshoot).Arguments
- vec3 source - Source vector.
- vec3 target - Target vector.
- float max_angle - Angular step, in degrees. If a negative value is specified, 0 will be used instead.
Return value
Resulting rotation vector.quat RotationFromDir ( vec3 forward, vec3 up ) #
Returns the rotation quaternion for the specified "forward" and "up" directions. For more information see Matrix Transformations.Arguments
- vec3 forward - Forward direction vector defining the direction to look in.
- vec3 up - Direction of the UP-vector.Vector defining in which direction up is.
Return value
Rotation quaternion.quat RotationFromDir ( vec3 forward ) #
Returns the rotation quaternion for the specified "forward" direction (the default "up" vector is used). For more information see Matrix Transformations.Arguments
- vec3 forward - Forward direction vector defining the direction to look in.
Return value
Rotation quaternion.float SmoothStep ( float x ) #
Returns a smooth Hermite interpolation between 0 and 1, if x is in the range [0, 1].

It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- float x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
double SmoothStep ( double x ) #
Returns a smooth Hermite interpolation between 0 and 1, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- double x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
decimal SmoothStep ( decimal x ) #
Returns a smooth Hermite interpolation between 0 and 1, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- decimal x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
float SmoothStep ( float from, float to, float x ) #
Returns a smooth Hermite interpolation between 0 and 1, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- float from - From value (beginning of the range).
- float to - To value (end of the range).
- float x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than from;
- 1 if x is greater than to;
- interpolated value between 0 and 1 if x is in the range [from, to].
double SmoothStep ( double from, double to, double x ) #
Returns a smooth Hermite interpolation between 0 and 1, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- double from - From value (beginning of the range).
- double to - To value (end of the range).
- double x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than from;
- 1 if x is greater than to;
- interpolated value between 0 and 1 if x is in the range [from, to].
float SmootherStep ( float x ) #
Returns a smooth interpolation between 0 and 1 using a fifth-order polynomial function, if x is in the range [0, 1].

It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- float x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
double SmootherStep ( double x ) #
Returns a smooth interpolation between 0 and 1 using a fifth-order polynomial function, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- double x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
decimal SmootherStep ( decimal x ) #
Returns a smooth interpolation between 0 and 1 using a fifth-order polynomial function, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- decimal x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than 0;
- 1 if x is greater than 1;
- interpolated value between 0 and 1 if x is in the range [0, 1].
float SmootherStep ( float from, float to, float x ) #
Returns a smooth interpolation between 0 and 1 using a fifth-order polynomial function, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- float from - From value (beginning of the range).
- float to - To value (end of the range).
- float x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than from;
- 1 if x is greater than to;
- interpolated value between 0 and 1 if x is in the range [from, to].
double SmootherStep ( double from, double to, double x ) #
Returns a smooth interpolation between 0 and 1 using a fifth-order polynomial function, if x is in the range [0, 1].
It is convenient for creating a sequence of transitions using smoothstep to interpolate each segment as an alternative to using more sophisticated or expensive interpolation techniques.
Arguments
- double from - From value (beginning of the range).
- double to - To value (end of the range).
- double x - Value to be interpolated.
Return value
Resulting interpolated value.
- 0 if x is less than from;
- 1 if x is greater than to;
- interpolated value between 0 and 1 if x is in the range [from, to].
float SmoothDamp ( float current, float target, float current_velocity, float smooth_time, float max_speed, float delta_time ) #
Gradually changes a value towards a desired target over time.Arguments
- float current - Current value.
- float target - Target value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float max_speed - Maximum possible speed of transition.
- float delta_time - The time since the last call of this method.
Return value
Resulting value.float SmoothDamp ( float current, float target, float current_velocity, float smooth_time, float delta_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed.Arguments
- float current - Current value.
- float target - Target value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float delta_time - The time since the last call of this method.
Return value
Resulting value.float SmoothDamp ( float current, float target, float current_velocity, float smooth_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- float current - Current value.
- float target - Target value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting value.double SmoothDamp ( double current, double target, double current_velocity, double smooth_time, double max_speed, double delta_time ) #
Gradually changes a value towards a desired target over time.Arguments
- double current - Current value.
- double target - Target value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
- double max_speed - Maximum possible speed of transition.
- double delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.double SmoothDamp ( double current, double target, double current_velocity, double smooth_time, double delta_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed.Arguments
- double current - Current value.
- double target - Target value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
- double delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.double SmoothDamp ( double current, double target, double current_velocity, double smooth_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- double current - Current value.
- double target - Target value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting interpolated value.vec2 SmoothDamp ( vec2 current, vec2 target, vec2 current_velocity, float smooth_time, float max_speed, float delta_time ) #
Gradually changes a value towards a desired target over time.Arguments
- vec2 current - Current value.
- vec2 target - Target value.
- vec2 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float max_speed - Maximum possible speed of transition.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.vec2 SmoothDamp ( vec2 current, vec2 target, vec2 current_velocity, float smooth_time, float delta_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed.Arguments
- vec2 current - Current value.
- vec2 target - Target value.
- vec2 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.vec2 SmoothDamp ( vec2 current, vec2 target, vec2 current_velocity, float smooth_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- vec2 current - Current value.
- vec2 target - Target value.
- vec2 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting interpolated value.vec3 SmoothDamp ( vec3 current, vec3 target, vec3 current_velocity, float smooth_time, float max_speed, float delta_time ) #
Gradually changes a value towards a desired target over time.Arguments
- vec3 current - Current value.
- vec3 target - Target value.
- vec3 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float max_speed - Maximum possible speed of transition.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.vec3 SmoothDamp ( vec3 current, vec3 target, vec3 current_velocity, float smooth_time, float delta_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed.Arguments
- vec3 current - Current value.
- vec3 target - Target value.
- vec3 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.vec3 SmoothDamp ( vec3 current, vec3 target, vec3 current_velocity, float smooth_time ) #
Gradually changes a value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- vec3 current - Current value.
- vec3 target - Target value.
- vec3 current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting interpolated value.float SmoothDampAngle ( float current, float target, float current_velocity, float smooth_time, float max_speed, float delta_time ) #
Gradually changes an angle value towards a desired target over time.Arguments
- float current - Current angle value.
- float target - Target angle value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float max_speed - Maximum possible speed of transition.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.float SmoothDampAngle ( float current, float target, float current_velocity, float smooth_time, float delta_time ) #
Gradually changes an angle value towards a desired target over time without any limitations of the transition speed.Arguments
- float current - Current angle value.
- float target - Target angle value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
- float delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.float SmoothDampAngle ( float current, float target, float current_velocity, float smooth_time ) #
Gradually changes an angle value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- float current - Current angle value.
- float target - Target angle value.
- float current_velocity - Current velocity, the value modified by the function every time it is called.
- float smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting interpolated value.double SmoothDampAngle ( double current, double target, double current_velocity, double smooth_time, double max_speed, double delta_time ) #
Gradually changes an angle value towards a desired target over time.Arguments
- double current - Current angle value.
- double target - Target angle value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
- double max_speed - Maximum possible speed of transition.
- double delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.double SmoothDampAngle ( double current, double target, double current_velocity, double smooth_time, double delta_time ) #
Gradually changes an angle value towards a desired target over time without any limitations of the transition speed.Arguments
- double current - Current angle value.
- double target - Target angle value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
- double delta_time - The time since the last call of this method.
Return value
Resulting interpolated value.double SmoothDampAngle ( double current, double target, double current_velocity, double smooth_time ) #
Gradually changes an angle value towards a desired target over time without any limitations of the transition speed. Delta time is taken as Game.IFps.Arguments
- double current - Current angle value.
- double target - Target angle value.
- double current_velocity - Current velocity, the value modified by the function every time it is called.
- double smooth_time - Time required for smooth damping of the transition speed.
Return value
Resulting interpolated value.float Gamma ( float value, float abs_max, float gamma ) #
Returns the argument raised to the power of the gamma value.Arguments
- float value - Value.
- float abs_max - Absolute of the maximum possible value.
- float gamma - Gamma value.
Return value
Value raised to the power of gamma, or value itself, if it is more than abs_max.double Gamma ( double value, double abs_max, double gamma ) #
Returns the argument raised to the power of the gamma value.Arguments
- double value - Value.
- double abs_max
- double gamma
Return value
Value raised to the power of gamma, or value itself, if it is more than abs_max.int SignMask ( int v ) #
Returns the sign of the argument value.Arguments
- int v - Value.
Return value
0 if the value is positive or zero, -1, if the value is negative.int Npot ( int v ) #
Rounds up to the nearest power of two value.Arguments
- int v - Argument value.
Return value
The nearest upper power of 2 number.bool IsPot ( int v ) #
Checks if the argument value is a power of two. Doesn't check the zero value.Arguments
- int v - Argument value.
Return value
true if the value is a power of two; otherwise, false.int Isqrt ( int v ) #
Returns the integer square root of the argument value.Arguments
- int v - Argument value.
Return value
Integer square root of the value.int UDiv ( int x, int y ) #
Performs integer division with rounding up.Arguments
- int x - First argument.
- int y - Second argument.
Return value
The rounded up quotient of two arguments that satisfies the following condition: y * z >= x.long BigMul ( int a, int b ) #
Returns the full product of two arguments.Arguments
- int a - First argument.
- int b - Second argument.
Return value
Product of two arguments.long BigMul ( long a, long b, long low ) #
Returns the full product of two arguments.Arguments
- long a - First argument.
- long b - Second argument.
- long low - The low 64-bit of the product of the specified numbers.
Return value
The high 64-bit of the product of two arguments.ulong BigMul ( ulong a, ulong b, ulong low ) #
Returns the full product of two arguments.Arguments
- ulong a - First argument.
- ulong b - Second argument.
- ulong low - The low 64-bit of the product of the specified numbers.
Return value
The high 64-bit of the product of two arguments.int DivRem ( int a, int b, int result ) #
Calculates the quotient of two arguments and returns the remainder in an output parameter.Arguments
- int a - The dividend.
- int b - The divisor, should not equal to 0.
- int result - The remainder.
Return value
The quotient of the specified numbers.long DivRem ( long a, long b, long result ) #
Calculates the quotient of two arguments and returns the remainder in an output parameter.Arguments
- long a - The dividend.
- long b - The divisor, should not equal to 0.
- long result - The remainder.
Return value
The quotient of the specified numbers.float BitDecrement ( float x ) #
Returns the next smallest value that compares less than argument.Arguments
- float x - The value to decrement.
Return value
One of the following:
- The next smallest value that compares less than x.
- -inf if x equals -inf.
- NaN if x equals NaN.
double BitDecrement ( double x ) #
Returns the next smallest value that compares less than argument.Arguments
- double x - The value to decrement.
Return value
One of the following:
- The next smallest value that compares less than x.
- -inf if x equals -inf.
- NaN if x equals NaN.
float BitIncrement ( float x ) #
Returns the next largest value that compares greater than argument.Arguments
- float x - The value to increment.
Return value
One of the following:
- The next largest value that compares greater than x.
- inf if x equals inf.
- NaN if x equals NaN.
double BitIncrement ( double x ) #
Returns the next largest value that compares greater than argument.Arguments
- double x - The value to increment.
Return value
One of the following:
- The next largest value that compares greater than x.
- inf if x equals inf.
- NaN if x equals NaN.
float Cbrt ( float x ) #
Returns the cube root of a specified argument.Arguments
- float x - Value.
Return value
The cube root of x.double Cbrt ( double x ) #
Returns the cube root of a specified argument.Arguments
- double x - Value.
Return value
The cube root of x.float CopySign ( float x, float y ) #
Returns a value with the magnitude of x and the sign of y.Arguments
- float x - A number whose magnitude is used in the result.
- float y - A number whose sign is the used in the result.
Return value
Value with the magnitude of x and the sign of y.double CopySign ( double x, double y ) #
Returns a value with the magnitude of x and the sign of y.Arguments
- double x - A number whose magnitude is used in the result.
- double y - A number whose sign is the used in the result.
Return value
Value with the magnitude of x and the sign of y.float FusedMultiplyAdd ( float x, float y, float z ) #
Returns (x * y) + z, rounded as one ternary operation.Arguments
- float x - The number to be multiplied with y.
- float y - The number to be multiplied with x.
- float z - The number to be added to the result of x multiplied by y.
Return value
(x * y) + z, rounded as one ternary operation.float ILogB ( float x ) #
Returns the base 2 integer logarithm of a specified number.Arguments
- float x - The number whose logarithm is to be found.
Return value
One of the values in the following table:
| X parameter | Return value |
|---|---|
| Default | The base 2 integer log of x; that is, (int)log2(x). |
| Zero | MinValue |
| Equal to NaN, inf or -inf | MaxValue |
double ILogB ( double x ) #
Returns the base 2 integer logarithm of a specified number.Arguments
- double x - The number whose logarithm is to be found.
Return value
One of the values in the following table:
| X parameter | Return value |
|---|---|
| Default | The base 2 integer log of x; that is, (int)log2(x). |
| Zero | MinValue |
| Equal to NaN, inf or -inf | MaxValue |
float MaxMagnitude ( float x, float y ) #
Returns the larger magnitude of the two arguments.Arguments
- float x - The first of two numbers to compare.
- float y - The second of two numbers to compare.
Return value
Parameter x or y, whichever has the larger magnitude. If x, or y, or both x and y are equal to NaN, NaN is returned.double MaxMagnitude ( double x, double y ) #
Returns the larger magnitude of the two arguments.Arguments
- double x - The first of two numbers to compare.
- double y - The second of two numbers to compare.
Return value
Parameter x or y, whichever has the larger magnitude. If x, or y, or both x and y are equal to NaN, NaN is returned.float MinMagnitude ( float x, float y ) #
Returns the smaller magnitude of two arguments.Arguments
- float x - The first of two numbers to compare.
- float y - The second of two numbers to compare.
Return value
Parameter x or y, whichever has the smaller magnitude. If x, or y, or both x and y are equal to NaN, NaN is returned.double MinMagnitude ( double x, double y ) #
Returns the smaller magnitude of two arguments.Arguments
- double x - The first of two numbers to compare.
- double y - The second of two numbers to compare.
Return value
Parameter x or y, whichever has the smaller magnitude. If x, or y, or both x and y are equal to NaN, NaN is returned.float ScaleB ( float x, int n ) #
Returns x * 2^n computed efficiently.Arguments
- float x - Base value.
- int n - Power.
Return value
x * 2^n computed efficiently.double ScaleB ( double x, int n ) #
Returns x * 2^n computed efficiently.Arguments
- double x - Base value.
- int n - Power.
Return value
x * 2^n computed efficiently.float IEEERemainder ( float x, float y ) #
Returns the remainder resulting from the division of a specified number by another specified number.Arguments
- float x - Dividend.
- float y - Divisor.
Return value
A number equal to x - (y Q), where Q is the quotient of x / y rounded to the nearest integer (if x / y falls halfway between two integers, the even integer is returned).
If x - (y Q) is zero, the value +0 is returned if x is positive, or -0 if x is negative.
If y = 0, NaN is returned.
double IEEERemainder ( double x, double y ) #
Returns the remainder resulting from the division of a specified number by another specified number.Arguments
- double x - Dividend.
- double y - Divisor.
Return value
A number equal to x - (y Q), where Q is the quotient of x / y rounded to the nearest integer (if x / y falls halfway between two integers, the even integer is returned).
If x - (y Q) is zero, the value +0 is returned if x is positive, or -0 if x is negative.
If y = 0, NaN is returned.
vec4 BlueNoise ( int x, int y ) #
Returns a blue noise value for the given pixel coordinates.Arguments
- int x - X coordinate of the pixel.
- int y - Y coordinate of the pixel.
Return value
Blue noise value.float Trace ( mat2 m ) #
Returns the trace of the matrix.Arguments
- mat2 m - Matrix.
Return value
Trace of the matrix.float Trace ( mat3 m ) #
Returns the trace of the matrix.Arguments
- mat3 m - Matrix.
Return value
Trace of the matrix.float Trace ( mat4 m ) #
Returns the trace of the matrix.Arguments
- mat4 m - Matrix.
Return value
Trace of the matrix.float Determinant ( mat2 m ) #
Returns the determinant of the given matrix.Arguments
- mat2 m - Matrix.
Return value
Resulting float value.float Determinant ( mat3 m ) #
Returns the determinant of the given matrix.Arguments
- mat3 m - Matrix.
Return value
Resulting float value.float Determinant ( mat4 m ) #
Returns the determinant of the given matrix.Arguments
- mat4 m - Matrix.
Return value
Resulting float value.double Determinant ( dmat4 m ) #
Returns the determinant of the given matrix.Arguments
- dmat4 m - Matrix.
Return value
Resulting double value.mat2 Mul ( mat2 m, float v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat2 m - Matrix multiplier.
- float v - A float multiplier.
Return value
Return value.vec2 Mul ( mat2 m, vec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat2 m - Matrix multiplier.
- vec2 v - Vector multiplier.
Return value
Return value.vec2 Mul ( vec2 v, mat2 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- mat2 m - Matrix multiplier.
Return value
Return value.dvec2 Mul ( mat2 m, dvec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat2 m - Matrix multiplier.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul ( dvec2 v, mat2 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- mat2 m - Matrix multiplier.
Return value
Return value.mat2 Mul ( mat2 m0, mat2 m1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat2 m0 - Matrix multiplier.
- mat2 m1 - Matrix multiplier.
Return value
Return value.mat3 Mul ( mat3 m, float v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m - Matrix multiplier.
- float v - A float multiplier.
Return value
Return value.vec2 Mul ( mat3 m, vec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m - Matrix multiplier.
- vec2 v - Vector multiplier.
Return value
Return value.vec2 Mul ( vec2 v, mat3 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- mat3 m - Matrix multiplier.
Return value
Return value.vec3 Mul ( mat3 m, vec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m - Matrix multiplier.
- vec3 v - Vector multiplier.
Return value
Return value.vec3 Mul ( vec3 v, mat3 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- mat3 m - Matrix multiplier.
Return value
Return value.dvec2 Mul ( mat3 m, dvec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m - Matrix multiplier.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul ( dvec2 v, mat3 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- mat3 m - Matrix multiplier.
Return value
Return value.dvec3 Mul ( mat3 m, dvec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m - Matrix multiplier.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul ( dvec3 v, mat3 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- mat3 m - Matrix multiplier.
Return value
Return value.mat3 Mul ( mat3 m0, mat3 m1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat3 m0 - Matrix multiplier.
- mat3 m1 - Matrix multiplier.
Return value
Return value.mat4 Mul ( mat4 m, float v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- float v - A float multiplier.
Return value
Return value.mat4 Mul ( mat4 m0, mat4 m1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m0 - Matrix multiplier.
- mat4 m1 - Matrix multiplier.
Return value
Return value.vec2 Mul ( mat4 m, vec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- vec2 v - Vector multiplier.
Return value
Return value.vec2 Mul ( vec2 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.vec3 Mul ( mat4 m, vec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- vec3 v - Vector multiplier.
Return value
Return value.vec3 Mul ( vec3 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.vec4 Mul ( mat4 m, vec4 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- vec4 v - Vector multiplier.
Return value
Return value.vec4 Mul ( vec4 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec4 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.dvec2 Mul ( mat4 m, dvec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul ( dvec2 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.dvec3 Mul ( mat4 m, dvec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul ( dvec3 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.dvec4 Mul ( mat4 m, dvec4 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix multiplier.
- dvec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul ( dvec4 v, mat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec4 v - Vector multiplier.
- mat4 m - Matrix multiplier.
Return value
Return value.dmat4 Mul ( dmat4 m, double v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- double v - A double multiplier.
Return value
Return value.dmat4 Mul ( dmat4 m0, dmat4 m1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m0 - Matrix multiplier.
- dmat4 m1 - Matrix multiplier.
Return value
Return value.dvec2 Mul ( dmat4 m, vec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- vec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul ( vec2 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.dvec3 Mul ( dmat4 m, vec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- vec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul ( vec3 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.dvec4 Mul ( dmat4 m, vec4 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- vec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul ( vec4 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec4 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.dvec2 Mul ( dmat4 m, dvec2 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul ( dvec2 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.dvec3 Mul ( dmat4 m, dvec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul ( dvec3 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.dvec4 Mul ( dmat4 m, dvec4 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix multiplier.
- dvec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul ( dvec4 v, dmat4 m ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec4 v - Vector multiplier.
- dmat4 m - Matrix multiplier.
Return value
Return value.vec3 Mul ( quat q, vec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- quat q - Quaternion.
- vec3 v - Vector multiplier.
Return value
Return value.vec3 Mul ( vec3 v, quat q ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- quat q - Quaternion.
Return value
Return value.dvec3 Mul ( quat q, dvec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- quat q - Quaternion.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul ( dvec3 v, quat q ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- quat q - Quaternion.
Return value
Return value.quat Mul ( quat q, float v ) #
Returns the result of multiplication of the specified arguments.Arguments
- quat q - Quaternion.
- float v - A float multiplier.
Return value
Return value.quat Mul ( quat q0, quat q1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- quat q0 - Quaternion.
- quat q1 - Quaternion.
Return value
Return value.vec2 Mul ( vec2 v0, vec2 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec2 v0 - First vector multiplier.
- vec2 v1 - Second vector multiplier.
Return value
Return value.vec3 Mul ( vec3 v0, vec3 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec3 v0 - First vector multiplier.
- vec3 v1 - Second vector multiplier.
Return value
Return value.vec4 Mul ( vec4 v0, vec4 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- vec4 v0 - First vector multiplier.
- vec4 v1 - Second vector multiplier.
Return value
Return value.dvec2 Mul ( dvec2 v0, dvec2 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec2 v0 - First vector multiplier.
- dvec2 v1 - Second vector multiplier.
Return value
Return value.dvec3 Mul ( dvec3 v0, dvec3 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec3 v0 - First vector multiplier.
- dvec3 v1 - Second vector multiplier.
Return value
Return value.dvec4 Mul ( dvec4 v0, dvec4 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- dvec4 v0 - First vector multiplier.
- dvec4 v1 - Second vector multiplier.
Return value
Return value.ivec2 Mul ( ivec2 v0, ivec2 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- ivec2 v0 - First vector multiplier.
- ivec2 v1 - Second vector multiplier.
Return value
Return value.ivec3 Mul ( ivec3 v0, ivec3 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- ivec3 v0 - First vector multiplier.
- ivec3 v1 - Second vector multiplier.
Return value
Return value.ivec4 Mul ( ivec4 v0, ivec4 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- ivec4 v0 - First vector multiplier.
- ivec4 v1 - Second vector multiplier.
Return value
Return value.Vector2 Mul ( Vector2 v0, Vector2 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- Vector2 v0 - First vector multiplier.
- Vector2 v1 - Second vector multiplier.
Return value
Return value.Vector3 Mul ( Vector3 v0, Vector3 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- Vector3 v0 - First vector multiplier.
- Vector3 v1 - Second vector multiplier.
Return value
Return value.Vector4 Mul ( Vector4 v0, Vector4 v1 ) #
Returns the result of multiplication of the specified arguments.Arguments
- Vector4 v0 - First vector multiplier.
- Vector4 v1 - Second vector multiplier.
Return value
Return value.vec2 Mul3 ( mat4 m, vec2 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- vec2 v - Vector multiplier.
Return value
Return value.vec2 Mul3 ( vec2 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.vec3 Mul3 ( mat4 m, vec3 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- vec3 v - Vector multiplier.
Return value
Return value.vec3 Mul3 ( vec3 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.vec4 Mul3 ( mat4 m, vec4 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- vec4 v - Vector multiplier.
Return value
Return value.vec4 Mul3 ( vec4 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec4 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.dvec2 Mul3 ( mat4 m, dvec2 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul3 ( dvec2 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.dvec3 Mul3 ( mat4 m, dvec3 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul3 ( dvec3 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.dvec4 Mul3 ( mat4 m, dvec4 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m - Matrix.
- dvec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul3 ( dvec4 v, mat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec4 v - Vector multiplier.
- mat4 m - Matrix.
Return value
Return value.mat4 Mul3 ( mat4 m0, mat4 m1 ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- mat4 m0 - Matrix.
- mat4 m1 - Matrix.
Return value
Return value.dvec2 Mul3 ( dmat4 m, vec2 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- vec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul3 ( vec2 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec2 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dvec3 Mul3 ( dmat4 m, vec3 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- vec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul3 ( vec3 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec3 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dvec4 Mul3 ( dmat4 m, vec4 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- vec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul3 ( vec4 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- vec4 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dvec2 Mul3 ( dmat4 m, dvec2 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- dvec2 v - Vector multiplier.
Return value
Return value.dvec2 Mul3 ( dvec2 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec2 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dvec3 Mul3 ( dmat4 m, dvec3 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- dvec3 v - Vector multiplier.
Return value
Return value.dvec3 Mul3 ( dvec3 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec3 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dvec4 Mul3 ( dmat4 m, dvec4 v ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m - Matrix.
- dvec4 v - Vector multiplier.
Return value
Return value.dvec4 Mul3 ( dvec4 v, dmat4 m ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dvec4 v - Vector multiplier.
- dmat4 m - Matrix.
Return value
Return value.dmat4 Mul3 ( dmat4 m0, dmat4 m1 ) #
Returns the result of multiplication of three components of the specified arguments.Arguments
- dmat4 m0 - Matrix.
- dmat4 m1 - Matrix.
Return value
Return value.mat4 Mul4 ( mat4 m0, mat4 m1 ) #
Returns the result of multiplication of four components of the specified arguments.Arguments
- mat4 m0 - Matrix.
- mat4 m1 - Matrix.
Return value
Return value.dmat4 Mul4 ( dmat4 m0, dmat4 m1 ) #
Returns the result of multiplication of four components of the specified arguments.Arguments
- dmat4 m0 - Matrix.
- dmat4 m1 - Matrix.
Return value
Return value.mat4 Mult ( mat4 m, vec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- mat4 m - Matrix.
- vec3 v - Vector.
Return value
Return matrix.dmat4 Mult ( dmat4 m, dvec3 v ) #
Returns the result of multiplication of the specified arguments.Arguments
- dmat4 m - Matrix.
- dvec3 v - Vector.
Return value
Return matrix.quat Div ( quat q, float v ) #
Returns the result of division of the specified arguments.Arguments
- quat q - Quaternion.
- float v - A float divisor value.
Return value
Return value.quat Div ( quat q0, quat q1 ) #
Returns the result of division of the specified arguments.Arguments
- quat q0 - Dividend quaternion.
- quat q1 - Divisor quaternion.
Return value
Return value.vec2 Div ( vec2 v0, vec2 v1 ) #
Returns the result of division of the specified arguments.Arguments
- vec2 v0 - Dividend.
- vec2 v1 - Divisor.
Return value
Return value.vec3 Div ( vec3 v0, vec3 v1 ) #
Returns the result of division of the specified arguments.Arguments
- vec3 v0 - Dividend.
- vec3 v1 - Divisor.
Return value
Return value.vec4 Div ( vec4 v0, vec4 v1 ) #
Returns the result of division of the specified arguments.Arguments
- vec4 v0 - Dividend.
- vec4 v1 - Divisor.
Return value
Return value.dvec2 Div ( dvec2 v0, dvec2 v1 ) #
Returns the result of division of the specified arguments.Arguments
- dvec2 v0 - Dividend.
- dvec2 v1 - Divisor.
Return value
Return value.dvec3 Div ( dvec3 v0, dvec3 v1 ) #
Returns the result of division of the specified arguments.Arguments
- dvec3 v0 - Dividend.
- dvec3 v1 - Divisor.
Return value
Return value.dvec4 Div ( dvec4 v0, dvec4 v1 ) #
Returns the result of division of the specified arguments.Arguments
- dvec4 v0 - Dividend.
- dvec4 v1 - Divisor.
Return value
Return value.ivec2 Div ( ivec2 v0, ivec2 v1 ) #
Returns the result of division of the specified arguments.Arguments
- ivec2 v0 - Dividend.
- ivec2 v1 - Divisor.
Return value
Return value.ivec3 Div ( ivec3 v0, ivec3 v1 ) #
Returns the result of division of the specified arguments.Arguments
- ivec3 v0 - Dividend.
- ivec3 v1 - Divisor.
Return value
Return value.ivec4 Div ( ivec4 v0, ivec4 v1 ) #
Returns the result of division of the specified arguments.Arguments
- ivec4 v0 - Dividend.
- ivec4 v1 - Divisor.
Return value
Return value.Vector2 Div ( Vector2 v0, Vector2 v1 ) #
Returns the result of division of the specified arguments.Arguments
- Vector2 v0 - Vector of 2 components.
- Vector2 v1 - Vector of 2 components.
Return value
Return value.Vector3 Div ( Vector3 v0, Vector3 v1 ) #
Returns the result of division of the specified arguments.Arguments
- Vector3 v0 - Vector of 3 components.
- Vector3 v1 - Vector of 3 components.
Return value
Return value.Vector4 Div ( Vector4 v0, Vector4 v1 ) #
Returns the result of division of the specified arguments.Arguments
- Vector4 v0 - Vector of 4 components.
- Vector4 v1 - Vector of 4 components.
Return value
Return value.mat2 Add ( mat2 m0, mat2 m1 ) #
Performs addition with the specified arguments.Arguments
- mat2 m0 - First matrix.
- mat2 m1 - Second matrix.
Return value
Return value.mat3 Add ( mat3 m0, mat3 m1 ) #
Performs addition with the specified arguments.Arguments
- mat3 m0 - First matrix.
- mat3 m1 - Second matrix.
Return value
Return value.mat4 Add ( mat4 m0, mat4 m1 ) #
Performs addition with the specified arguments.Arguments
- mat4 m0 - First matrix.
- mat4 m1 - Second matrix.
Return value
Return value.dmat4 Add ( dmat4 m0, dmat4 m1 ) #
Performs addition with the specified arguments.Arguments
- dmat4 m0 - First matrix.
- dmat4 m1 - Second matrix.
Return value
Return value.quat Add ( quat q0, quat q1 ) #
Performs addition with the specified arguments.Arguments
- quat q0 - First quaternion.
- quat q1 - First quaternion.
Return value
Return value.vec2 Add ( vec2 v0, vec2 v1 ) #
Performs addition with the specified arguments.Arguments
- vec2 v0 - First vector.
- vec2 v1 - Second vector.
Return value
Return value.vec3 Add ( vec3 v0, vec3 v1 ) #
Performs addition with the specified arguments.Arguments
- vec3 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Return value.vec4 Add ( vec4 v0, vec4 v1 ) #
Performs addition with the specified arguments.Arguments
- vec4 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Return value.dvec2 Add ( dvec2 v0, dvec2 v1 ) #
Performs addition with the specified arguments.Arguments
- dvec2 v0 - First vector.
- dvec2 v1 - Second vector.
Return value
Return value.dvec3 Add ( dvec3 v0, dvec3 v1 ) #
Performs addition with the specified arguments.Arguments
- dvec3 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Return value.dvec4 Add ( dvec4 v0, dvec4 v1 ) #
Performs addition with the specified arguments.Arguments
- dvec4 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Return value.ivec2 Add ( ivec2 v0, ivec2 v1 ) #
Performs addition with the specified arguments.Arguments
- ivec2 v0 - First vector.
- ivec2 v1 - Second vector.
Return value
Return value.ivec3 Add ( ivec3 v0, ivec3 v1 ) #
Performs addition with the specified arguments.Arguments
- ivec3 v0 - First vector.
- ivec3 v1 - Second vector.
Return value
Return value.ivec4 Add ( ivec4 v0, ivec4 v1 ) #
Performs addition with the specified arguments.Arguments
- ivec4 v0 - First vector.
- ivec4 v1 - Second vector.
Return value
Return value.Vector2 Add ( Vector2 v0, Vector2 v1 ) #
Performs addition with the specified arguments.Arguments
- Vector2 v0 - First vector.
- Vector2 v1 - Second vector.
Return value
Return value.Vector3 Add ( Vector3 v0, Vector3 v1 ) #
Performs addition with the specified arguments.Arguments
- Vector3 v0 - First vector.
- Vector3 v1 - Second vector.
Return value
Return value.Vector4 Add ( Vector4 v0, Vector4 v1 ) #
Performs addition with the specified arguments.Arguments
- Vector4 v0 - First vector.
- Vector4 v1 - Second vector.
Return value
Return value.mat2 Sub ( mat2 m0, mat2 m1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- mat2 m0 - First matrix.
- mat2 m1 - Second matrix.
Return value
Return value.mat3 Sub ( mat3 m0, mat3 m1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- mat3 m0 - First matrix.
- mat3 m1 - Second matrix.
Return value
Return value.mat4 Sub ( mat4 m0, mat4 m1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- mat4 m0 - First matrix.
- mat4 m1 - Second matrix.
Return value
Return value.dmat4 Sub ( dmat4 m0, dmat4 m1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- dmat4 m0 - First matrix.
- dmat4 m1 - Second matrix.
Return value
Return value.quat Sub ( quat q0, quat q1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- quat q0
- quat q1
Return value
Return value.vec2 Sub ( vec2 v0, vec2 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- vec2 v0 - First vector.
- vec2 v1 - Second vector.
Return value
Return value.vec3 Sub ( vec3 v0, vec3 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- vec3 v0 - First vector.
- vec3 v1 - Second vector.
Return value
Return value.vec4 Sub ( vec4 v0, vec4 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- vec4 v0 - First vector.
- vec4 v1 - Second vector.
Return value
Return value.dvec2 Sub ( dvec2 v0, dvec2 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- dvec2 v0 - First vector.
- dvec2 v1 - Second vector.
Return value
Return value.dvec3 Sub ( dvec3 v0, dvec3 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- dvec3 v0 - First vector.
- dvec3 v1 - Second vector.
Return value
Return value.dvec4 Sub ( dvec4 v0, dvec4 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- dvec4 v0 - First vector.
- dvec4 v1 - Second vector.
Return value
Return value.ivec2 Sub ( ivec2 v0, ivec2 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- ivec2 v0 - First vector.
- ivec2 v1 - Second vector.
Return value
Return value.ivec3 Sub ( ivec3 v0, ivec3 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- ivec3 v0 - First vector.
- ivec3 v1 - Second vector.
Return value
Return value.ivec4 Sub ( ivec4 v0, ivec4 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- ivec4 v0 - First vector.
- ivec4 v1 - Second vector.
Return value
Return value.Vector2 Sub ( Vector2 v0, Vector2 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- Vector2 v0 - First vector.
- Vector2 v1 - Second vector.
Return value
Return value.Vector3 Sub ( Vector3 v0, Vector3 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- Vector3 v0 - First vector.
- Vector3 v1 - Second vector.
Return value
Return value.Vector4 Sub ( Vector4 v0, Vector4 v1 ) #
Subtracts each element in the second argument from its corresponding element in the first argument.Arguments
- Vector4 v0 - First vector.
- Vector4 v1 - Second vector.
Return value
Return value.quat Mad ( quat q0, float v, quat q1 ) #
Returns the result of multiplication of the first quaternion by the float value and addition of the second quaternion.Arguments
- quat q0 - First quaternion.
- float v - Float value.
- quat q1 - Second quaternion.
Return value
Return value.vec3 Proj ( mat4 m, vec3 v ) #
Returns the vector projected to the matrix space.Arguments
- mat4 m - Matrix.
- vec3 v - Vector in global coordinates.
Return value
Vector in the matrix coordinates.vec4 Proj ( mat4 m, vec4 v ) #
Returns the vector projected to the matrix space.Arguments
- mat4 m - Matrix.
- vec4 v - Vector in global coordinates.
Return value
Vector in the matrix coordinates.dvec3 Proj ( mat4 m, dvec3 v ) #
Returns the vector projected to the matrix space.Arguments
- mat4 m - Matrix.
- dvec3 v - Vector in global coordinates.
Return value
Vector in the matrix coordinates.dvec4 Proj ( mat4 m, dvec4 v ) #
Returns the vector projected to the matrix space.Arguments
- mat4 m - Matrix.
- dvec4 v - Vector in global coordinates.
Return value
Vector in the matrix coordinates.mat4 Ortho ( float l, float r, float b, float t, float n, float f ) #
Returns parallel projection matrix:
| 2.0 / (right - left) | 0.0 | 0.0 | -(right + left) / (right - left) |
| 0.0 | 2.0 / (top - bottom) | 0.0 | -(top + bottom) / (top - bottom) |
| 0.0 | 0.0 | -2.0 / (zfar - znear) | -(zfar + znear) / (zfar - znear) |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float l - Left vertical clipping plane.
- float r - Right vertical clipping plane.
- float b - Bottom horizontal clipping plane.
- float t - Top horizontal clipping plane.
- float n - Nearest depth clipping plane.
- float f - Farther depth clipping plane.
Return value
Parallel projection matrix.mat4 Frustum ( float l, float r, float b, float t, float n, float f ) #
Returns perspective projection matrix:
| 2.0 * znear / (right - left) | 0.0 | (right + left) / (right - left) | 0.0 |
| 0.0 | 2.0 * znear / (top - bottom) | (top + bottom) / (top - bottom) | 0.0 |
| 0.0 | 0.0 | -(zfar + znear) / (zfar - znear) | -2.0 * zfar * znear / (zfar - znear) |
| 0.0 | 0.0 | -1.0 | 0.0 |
Coordinates of top, left, right, bottom are set relatively to center point of the znear plane.
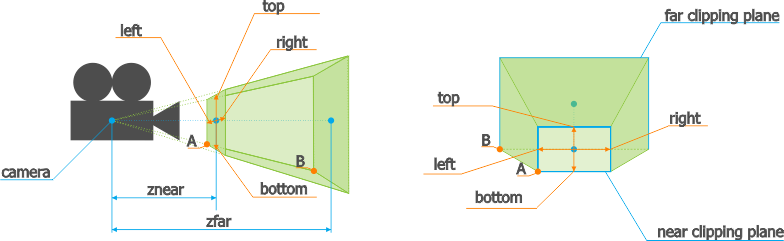
There are two different points (A and B) on the picture above. Since the top, left, right, bottom are coordinates relatively to the center point of the znear plane, coordinates of the A point should be A(left, bottom, znear). Coordinates of the B point are B(k * left, k * bottom, zfar), where k = zfar/znear.
Arguments
- float l - Left coordinate of the near clipping plane relatively to the center.
- float r - Right coordinate of the near clipping plane relatively to the center.
- float b - Bottom coordinate of the near clipping plane relatively to the center.
- float t - Top coordinate of the near clipping plane relatively to the center.
- float n - Distance to the near depth clipping plane.
- float f - Distance to the farther depth clipping plane.
Return value
Perspective projection matrix.mat4 Perspective ( float fov, float aspect, float n, float f ) #
Returns perspective projection matrix.Arguments
- float fov - Field of view angle.
- float aspect - Aspect ratio. The aspect ratio is the ratio of width to height.
- float n - Nearest depth clipping plane.
- float f - Farther depth clipping plane.
Return value
Perspective projection matrix.mat4 ObliqueProjection ( mat4 projection, vec4 plane ) #
Returns the oblique projection matrix.Arguments
- mat4 projection - Projection matrix.
- vec4 plane - Clipping plane.
Return value
Oblique projection matrix.mat4 ReverseDepthProjection ( mat4 projection ) #
Returns the reverse depth projection matrix — the projection matrix in which the elements that store the near and far clipping planes are multiplied by -1.Arguments
- mat4 projection - Projection matrix.
Return value
Reverse depth projection matrix.mat4 SymmetryProjection ( mat4 projection ) #
Returns the symmetric projection matrix.Arguments
- mat4 projection - Projection matrix.
Return value
Symmetric projection matrix.float DecomposePerspectiveFov ( mat4 projection ) #
Decomposes a given perspective projection matrix, extracting the field of view angle.Arguments
- mat4 projection - Perspective projection matrix.
Return value
Field of view angle.void DecomposeProjection ( mat4 projection, float znear, float zfar ) #
Decomposes a given projection matrix, extracting distances to near and far clipping planes.Arguments
- mat4 projection - Projection matrix.
- float znear - Near clipping plane.
- float zfar - Far clipping plane.
void DecomposeProjection ( mat4 projection, float znear, float zfar, float fov ) #
Decomposes a given projection matrix, extracting distances to near and far clipping planes, and the field of view.Arguments
- mat4 projection - Projection matrix.
- float znear - Near clipping plane.
- float zfar - Far clipping plane.
- float fov - Field of view.
mat4 Reflect ( vec4 plane ) #
Returns reflection matrix about a given plane.Arguments
- vec4 plane - Reflection plane.
Return value
Reflection matrix.dmat4 Reflect ( dvec4 plane ) #
Returns reflection matrix about a given plane.Arguments
- dvec4 plane - Reflection plane.
Return value
Reflection matrix.mat2 Transpose ( mat2 m ) #
Transposes a given matrix.Arguments
- mat2 m - Matrix.
Return value
Transposed matrix.mat3 Transpose ( mat3 m ) #
Transposes a given matrix.Arguments
- mat3 m - Matrix.
Return value
Transposed matrix.mat4 Transpose ( mat4 m ) #
Transposes a given matrix.Arguments
- mat4 m - Matrix.
Return value
Transposed matrix.mat4 Transpose3 ( mat4 m ) #
Transposes the upper left 3×3 sub-matrix of a matrix..Arguments
- mat4 m - Matrix.
Return value
Return value.mat3 Orthonormalize ( mat3 m ) #
Orthonormalizes a given matrix.Arguments
- mat3 m - Matrix.
Return value
Return value.mat4 Orthonormalize ( mat4 m ) #
Orthonormalizes a given matrix.Arguments
- mat4 m - Matrix.
Return value
Return value.dmat4 Orthonormalize ( dmat4 m ) #
Orthonormalizes a given matrix.Arguments
- dmat4 m - Matrix.
Return value
Return value.mat2 Inverse ( mat2 m ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- mat2 m - Matrix.
Return value
Return value.mat3 Inverse ( mat3 m ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- mat3 m - Matrix.
Return value
Return value.mat4 Inverse ( mat4 m ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- mat4 m - Matrix.
Return value
Return value.dmat4 Inverse ( dmat4 m ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- dmat4 m - Matrix.
Return value
Return value.quat Inverse ( quat q ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- quat q - Quaternion.
Return value
Return value.mat4 Inverse4 ( mat4 m ) #
Inverts a matrix that consists of a 3 × 4 sub-matrix (upper left) and a translation vector. The last row of the matrix is ignored. Compared to the inverse() function, this one is a bit faster and, which is more important, more stable. A matrix suitable for such inversion looks like this:| m00 | m10 | m20 | m30 |
| m01 | m11 | m21 | m31 |
| m02 | m12 | m22 | m32 |
| 0 | 0 | 0 | 1 |
Arguments
- mat4 m - Matrix.
Return value
Return value.dmat4 Inverse4 ( dmat4 m ) #
Inverts a matrix that consists of a 3 × 4 sub-matrix (upper left) and a translation vector. The last row of the matrix is ignored. Compared to the inverse() function, this one is a bit faster and, which is more important, more stable. A matrix suitable for such inversion looks like this:| m00 | m10 | m20 | m30 |
| m01 | m11 | m21 | m31 |
| m02 | m12 | m22 | m32 |
| 0 | 0 | 0 | 1 |
Arguments
- dmat4 m - Matrix.
Return value
Return value.mat2 Inverse ( mat2 m, float det ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- mat2 m - Matrix.
- float det
Return value
Return value.mat3 Inverse ( mat3 m, float det ) #
Returns inverse of a matrix. The inverse of a matrix is a matrix that if multiplied by the original would result in identity matrix: AA-1 = A-1A = I.Arguments
- mat3 m - Matrix.
- float det
Return value
Return value.quat Conjugate ( quat q ) #
Returns the conjugate of a given quaternion.Arguments
- quat q - Quaternion.
Return value
Return value.mat4 Translate ( vec3 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- vec3 v - Translation vector.
Return value
Resulting translation matrix.mat4 Translate ( vec4 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- vec4 v - Translation vector.
Return value
Resulting translation matrix.mat4 Translate ( vec2 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- vec2 v - Translation vector.
Return value
Resulting translation matrix.mat4 Translate ( float x, float y = 0.0f, float z = 0.0f ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float x - X coordinate of the translation vector.
- float y - Y coordinate of the translation vector.
- float z - Z coordinate of the translation vector.
Return value
Resulting translation matrix.dmat4 Translate ( dvec3 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- dvec3 v - Translation vector.
Return value
Resulting translation matrix.dmat4 Translate ( dvec4 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- dvec4 v - Translation vector.
Return value
Resulting translation matrix.dmat4 Translate ( dvec2 v ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- dvec2 v - Translation vector.
Return value
Resulting translation matrix.dmat4 Translate ( double x, double y = 0.0, double z = 0.0 ) #
Returns the translation matrix for the specified translation vector (X, Y, Z):| 1.0 | 0.0 | 0.0 | X |
| 0.0 | 1.0 | 0.0 | Y |
| 0.0 | 0.0 | 1.0 | Z |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- double x - X coordinate of the translation vector.
- double y - Y coordinate of the translation vector.
- double z - Z coordinate of the translation vector.
Return value
Resulting translation matrix.mat3 RotateX3 ( float angle ) #
Returns a resulting matrix for rotation around the X axis by the specified angle. The resulting matrix size for this method is 3 x 3.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat3 RotateY3 ( float angle ) #
Returns a resulting matrix for rotation around the Y axis by the specified angle. The resulting matrix size for this method is 3 x 3.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat3 RotateZ3 ( float angle ) #
Returns a resulting matrix for rotation around the Z axis by the specified angle. The resulting matrix size for this method is 3 x 3.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 RotateX ( float angle ) #
Returns a resulting matrix for rotation around the X axis by the specified angle.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.dmat4 RotateX ( double angle ) #
Returns a resulting matrix for rotation around the X axis by the specified angle.Arguments
- double angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 RotateY ( float angle ) #
Returns a resulting matrix for rotation around the Y axis by the specified angle.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.dmat4 RotateY ( double angle ) #
Returns a resulting matrix for rotation around the Y axis by the specified angle.Arguments
- double angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 RotateZ ( float angle ) #
Returns a resulting matrix for rotation around the Z axis by the specified angle.Arguments
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.dmat4 RotateZ ( double angle ) #
Returns a resulting matrix for rotation around the Z axis by the specified angle.Arguments
- double angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat3 Rotate3 ( vec3 axis, float angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components. The resulting matrix size for this method is 3 x 3.Arguments
- vec3 axis - Axis of rotation.
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat3 Rotate3 ( float x, float y, float z, float angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components. The resulting matrix size for this method is 3 x 3.Arguments
- float x - X coordinate of the axis-vector.
- float y - Y coordinate of the axis-vector.
- float z - Z coordinate of the axis-vector.
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat3 Rotate3 ( quat q ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components. The resulting matrix size for this method is 3 x 3.Arguments
- quat q - Quaternion.
Return value
Resulting rotation matrix.mat4 Rotate ( vec3 axis, float angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components.Arguments
- vec3 axis - Axis of rotation.
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 Rotate ( float x, float y, float z, float angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components.Arguments
- float x - X coordinate of the axis-vector.
- float y - Y coordinate of the axis-vector.
- float z - Z coordinate of the axis-vector.
- float angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 Rotate ( quat q ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components.Arguments
- quat q - Quaternion.
Return value
Resulting rotation matrix.dmat4 Rotate ( dvec3 axis, double angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components.Arguments
- dvec3 axis - Axis of rotation.
- double angle - Angle, in degrees.
Return value
Resulting rotation matrix.dmat4 Rotate ( double x, double y, double z, double angle ) #
Returns a resulting matrix for rotation by the specified angle around the axis specified as a quaternion/vector/vector components.Arguments
- double x - X coordinate of the axis-vector.
- double y - Y coordinate of the axis-vector.
- double z - Z coordinate of the axis-vector.
- double angle - Angle, in degrees.
Return value
Resulting rotation matrix.mat4 Rotation ( mat4 m ) #
Returns the rotation matrix for the given source matrix ignoring the translation column. For more information see Matrix Transformations.Arguments
- mat4 m - Matrix.
Return value
Return value.dmat4 Rotation ( dmat4 m ) #
Returns the rotation matrix for the given source matrix ignoring the translation column. For more information see Matrix Transformations.Arguments
- dmat4 m - Matrix.
Return value
Return value.mat3 Scale3 ( float x, float y, float z ) #
Returns scaling matrix for the specified scaling vector (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float x - X coordinate of the vector.
- float y - Y coordinate of the vector.
- float z - Z coordinate of the vector.
Return value
Resulting scaling matrix.mat3 Scale3 ( vec3 v ) #
Returns scaling matrix for the specified scaling vector (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- vec3 v - Scaling vector.
Return value
Resulting scaling matrix.mat4 Scale ( float x, float y, float z ) #
Returns scaling matrix for the specified scaling vector (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float x - X coordinate of the vector.
- float y - Y coordinate of the vector.
- float z - Z coordinate of the vector.
Return value
Resulting scaling matrix.mat4 Scale ( float x ) #
Returns scaling matrix for the specified scaling value:| X | 0.0 | 0.0 | 0.0 |
| 0.0 | X | 0.0 | 0.0 |
| 0.0 | 0.0 | X | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- float x - Scale value.
Return value
Resulting scaling matrix.mat4 Scale ( vec3 v ) #
Returns scaling matrix for the specified scaling vector (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- vec3 v - Scale vector.
Return value
Resulting scaling matrix.dmat4 Scale ( double x, double y, double z ) #
Returns scaling matrix for the specified scaling values (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- double x - Scale value.
- double y - Scale value.
- double z - Scale value.
Return value
Resulting scaling matrix.dmat4 Scale ( double x ) #
Returns scaling matrix for the specified scaling value:| X | 0.0 | 0.0 | 0.0 |
| 0.0 | X | 0.0 | 0.0 |
| 0.0 | 0.0 | X | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- double x - Scale value.
Return value
Resulting scaling matrix.dmat4 Scale ( dvec3 v ) #
Returns scaling matrix for the specified scaling vector (X, Y, Z):| X | 0.0 | 0.0 | 0.0 |
| 0.0 | Y | 0.0 | 0.0 |
| 0.0 | 0.0 | Z | 0.0 |
| 0.0 | 0.0 | 0.0 | 1.0 |
Arguments
- dvec3 v - Scale vector.
Return value
Resulting scaling matrix.mat4 SetTo ( vec3 position, vec3 target, vec3 up, MathLib.AXIS axis_forward ) #
Returns the transformation matrix, which puts an object to the specified position and sets it orientation to the specified target point.Arguments
- vec3 position - Position of the eye point.
- vec3 target - Position of the target point.
- vec3 up - Direction of the UP-vector.
- MathLib.AXIS axis_forward - Axis along which the forward direction vector is pointed. The default is negative Z.
Return value
Transformation matrix.dmat4 SetTo ( dvec3 position, dvec3 target, vec3 up, MathLib.AXIS axis_forward ) #
Returns the transformation matrix, which puts an object to the specified position and sets it orientation to the specified target point.Arguments
- dvec3 position - Position of the eye point.
- dvec3 target - Position of the target point.
- vec3 up - Direction of the UP-vector.
- MathLib.AXIS axis_forward - Axis along which the forward direction vector is pointed. The default is negative Z.
Return value
Transformation matrix.mat4 LookAt ( vec3 position, vec3 target, vec3 up, MathLib.AXIS axis_forward ) #
Returns the viewing matrix for the given eye point, target point, up and forward direction vectors. The forward direction vector is pointed along the specified axis. By default, it is negative Z.Arguments
- vec3 position - Position of the eye point.
- vec3 target - Position of the target point.
- vec3 up - Direction of the UP-vector.
- MathLib.AXIS axis_forward - Axis along which the forward direction vector is pointed. The default is negative Z.
Return value
Viewing matrix.dmat4 LookAt ( dvec3 position, dvec3 target, vec3 up, MathLib.AXIS axis_forward ) #
Returns the viewing matrix for the given eye point, target point, up and forward direction vectors. The forward direction vector is pointed along the specified axis. By default, it is negative Z.Arguments
- dvec3 position - Position of the eye point.
- dvec3 target - Position of the target point.
- vec3 up - Direction of the UP-vector.
- MathLib.AXIS axis_forward - Axis along which the forward direction vector is pointed. The default is negative Z.
Return value
Viewing matrix.mat4 CubeTransform ( int face ) #
Returns cube viewing matrix for the given cube face.Arguments
- int face - Cube face number.
Return value
Cube viewing matrix.mat3 Jacobi ( mat3 m, mat3 v ) #
Returns the Jacobian matrix for the given 3x3 matrix.Arguments
- mat3 m - Matrix, for which the Jacobian matrix is to be calculated.
- mat3 v - Output matrix, to which the calculated Jacobian matrix will be put.
Return value
Jacobian matrix.vec3 DecomposeRotationXYZ ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - XYZ. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (XYZ).vec3 DecomposeRotationXZY ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - XZY. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (XZY).vec3 DecomposeRotationYXZ ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - YXZ. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (YXZ).vec3 DecomposeRotationYZX ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - YZX. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (YZX).vec3 DecomposeRotationZXY ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - ZXY. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (ZXY).vec3 DecomposeRotationZYX ( mat3 t ) #
Decomposes a given rotation matrix to the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - ZYX. It is an order of the rings in the three-axis gimbal set: Z axis used as the outer ring (independent ring), while X axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- mat3 t - Rotation matrix to decompose.
Return value
Vector, containing Euler angles, in degrees (ZYX).void DecomposeTransform ( mat4 m, quat q0, quat q1, vec3 scale ) #
Decomposes a given transformation matrix into a vector representing translation and uniform scale and a quaternion representing rotation. For more information see Matrix Transformations.Arguments
- mat4 m - Transformation matrix to be decomposed.
- quat q0 - Quaternion representing a real part of the dual quaternion.
- quat q1 - Quaternion representing a dual part of the dual quaternion.
- vec3 scale - Scale part of the transformation.
void DecomposeTransform ( mat4 m, vec3 position, quat rot, vec3 scale ) #
Decomposes a given transformation matrix into translation, rotation and scale components.Arguments
- mat4 m - Transformation matrix to be decomposed.
- vec3 position - Output vector, to which the translation component of the transformation will be put.
- quat rot - Output quaternion, to which the rotation component of the transformation will be put.
- vec3 scale - Output vector, to which the scale component of the transformation will be put.
void DecomposeTransform ( mat4 m, vec4 position, quat rot ) #
Decomposes a given transformation matrix into a vector representing translation and uniform scale and a quaternion representing rotation. For more information see Matrix Transformations.Arguments
- mat4 m - Transformation matrix to be decomposed.
- vec4 position - Output vector (X, Y, Z, W), to which translation and scale components of the transformation will be put. (X, Y, Z) - represent translation, W = (scale.X + scale.Y + scale.z) / 3.
- quat rot - Output quaternion, to which the rotation component of the transformation will pe put.
void DecomposeTransform ( dmat4 m, dvec3 position, quat rot, vec3 scale ) #
Decomposes a given transformation matrix into a vector representing translation and uniform scale and a quaternion representing rotation. For more information see Matrix Transformations.Arguments
- dmat4 m - Transformation matrix to be decomposed.
- dvec3 position - Output vector, to which the translation component of the transformation will be put.
- quat rot - Output quaternion, to which the rotation component of the transformation will be put.
- vec3 scale - Output vector, to which the scale component of the transformation will be put.
mat4 ComposeRotationXYZ ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - XYZ. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeRotationXZY ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - XZY. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeRotationYXZ ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - YXZ. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeRotationYZX ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - YZX. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeRotationZXY ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - ZXY. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeRotationZYX ( vec3 r ) #
Composes a rotation matrix from the corresponding Euler angles. The Euler angles are specified in the axis rotation sequence - ZYX. It is an order of the rings in the three-axis gimbal set: X axis used as the outer ring (independent ring), while Z axis as the inner one (its rotation depends on other 2 rings).
When we talk about axes in UNIGINE we assume that:
- X axis points to the right giving us a pitch angle.
- Y axis points forward giving us a roll angle.
- Z axis points up giving us a yaw (heading) angle.
- X axis points to the right giving us a pitch angle.
- Y axis points up giving us a yaw (heading) angle.
- Z axis points backward giving us a -roll angle.
Arguments
- vec3 r - Vector, containing Euler angles, in degrees - (yaw, roll, pitch).
Return value
Composed rotation matrix.mat4 ComposeTransform ( quat q0, quat q1, vec3 scale ) #
Returns the transformation matrix for the specified position, rotation and scale. For more information see Matrix Transformations.Arguments
- quat q0
- quat q1
- vec3 scale - Scaling vector (scale.x, scale.y, scale.z).
Return value
Return value.mat4 ComposeTransform ( vec3 position, quat rot, vec3 scale ) #
Returns the transformation matrix for the specified position, rotation and scale. For more information see Matrix Transformations.Arguments
- vec3 position - Position coordinates (translation).
- quat rot - Quaternion representing rotation.
- vec3 scale - Scaling vector (scale.x, scale.y, scale.z).
Return value
Return value.mat4 ComposeTransform ( vec4 position, quat rot ) #
Returns the transformation matrix for the specified position, rotation and scale. For more information see Matrix Transformations.Arguments
- vec4 position - Position coordinates (translation).
- quat rot - Quaternion representing rotation.
Return value
Return value.dmat4 ComposeTransform ( dvec3 position, quat rot, vec3 scale ) #
Returns the transformation matrix for the specified position, rotation and scale. For more information see Matrix Transformations.Arguments
- dvec3 position - Position coordinates (translation).
- quat rot - Quaternion representing rotation.
- vec3 scale - Scaling vector (scale.x, scale.y, scale.z).
Return value
Return value.uint RandUInt ( ) #
Returns a random uint value.Return value
Random uint value.int RandInt ( ) #
Returns a random int value.Return value
Random int value.ulong RandULong ( ) #
Returns a random ulong value.Return value
Random ulong value.long RandLong ( ) #
Returns a random long value.Return value
Random long value.float RandFloat ( ) #
Returns a random float value.Return value
Random float value.double RandDouble ( ) #
Returns a random double value.Return value
Random double value.float RandInt ( int from, int to ) #
Returns a random float value within the set interval.Arguments
- int from - From value (beginning of the range).
- int to - To value (end of the range).
Return value
Random float value.float RandFloat ( float from, float to ) #
Returns a random float value within the set interval.Arguments
- float from - From value (beginning of the range).
- float to - To value (end of the range).
Return value
Resulting float value.double RandDouble ( double from, double to ) #
Returns a random double value within the set interval.Arguments
- double from - From value (beginning of the range).
- double to - To value (end of the range).
Return value
Resulting double value.vec2 RandVec2 ( vec2 from, vec2 to ) #
Returns a random vec2 value within the set interval.Arguments
- vec2 from - From value (beginning of the range).
- vec2 to - To value (end of the range).
Return value
Return value.vec3 RandVec3 ( vec3 from, vec3 to ) #
Returns a random vec3 value within the set interval.Arguments
- vec3 from - From value (beginning of the range).
- vec3 to - To value (end of the range).
Return value
Return value.vec4 RandVec4 ( vec4 from, vec4 to ) #
Returns a random vec4 value within the set interval.Arguments
- vec4 from - From value (beginning of the range).
- vec4 to - To value (end of the range).
Return value
Return value.float RandFixedFloat ( ) #
Returns a random float value within the interval (0.0f, 1.0f).Return value
Resulting float value.double RandFixedDouble ( ) #
Returns a random double value within the interval (0.0, 1.0).Return value
Resulting double value.vec4 RandColor ( ) #
Returns a random color vector. X, Y, Z values of the color vector are random values, W value is equal to 1.0f.Return value
Random color vector.vec3 RandDirection ( ) #
Returns a random normalized direction vector.Return value
Random direction vector.int ShiftAndWrap ( int value, int positions ) #
Shifts the successive fields of the argument value to the specified number of positions and wraps around the bits that are shifted beyond the value bits, instead of discarding them.Arguments
- int value - Value.
- int positions - Number of bits to shift the value to the left.
Return value
Resulting int value.int GetHashCode ( T[] list ) #
Returns a hash code for the current object. Serves as the default hash function.Arguments
- T[] list