LiDAR Demo
 LiDAR is a method used in robot vacuum cleaners, drones, self-driving cars, etc. for optical scanning of surroundings. This demo contains the LiDAR emulation that can be used for training autopilots and AI. A quick and accurate scaner is implemented using the depth buffer. You can configure your LiDAR (set the desired range, FOV, resolution, and other parameters) via API. LiDAR是一种用于机器人吸尘器,无人机,自动驾驶汽车等中的方法,用于对周围环境进行光学扫描。该演示包含LiDAR仿真,可用于训练自动驾驶仪和AI。使用深度缓冲区可实现快速准确的扫描程序。您可以通过API配置LiDAR(设置所需的范围,FOV,分辨率和其他参数)。
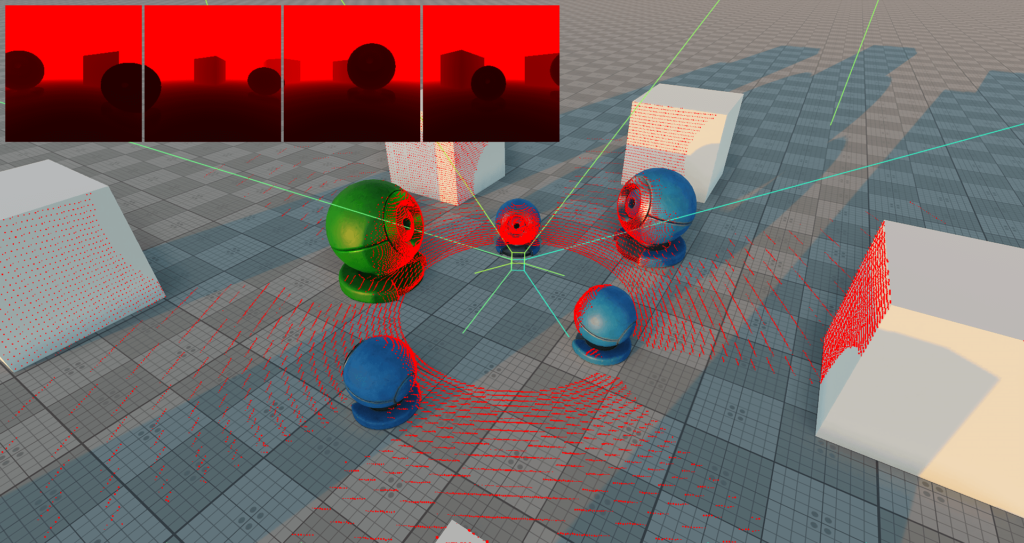
LiDAR is a method used in robot vacuum cleaners, drones, self-driving cars, etc. for optical scanning of surroundings. This demo contains the LiDAR emulation that can be used for training autopilots and AI. A quick and accurate scaner is implemented using the depth buffer. You can configure your LiDAR (set the desired range, FOV, resolution, and other parameters) via API. LiDAR是一种用于机器人吸尘器,无人机,自动驾驶汽车等中的方法,用于对周围环境进行光学扫描。该演示包含LiDAR仿真,可用于训练自动驾驶仪和AI。使用深度缓冲区可实现快速准确的扫描程序。您可以通过API配置LiDAR(设置所需的范围,FOV,分辨率和其他参数)。
Features特征#
- Reusable code emulating the LiDAR scanner模拟LiDAR扫描器的可重用代码
- Rendering from cameras into textures从相机渲染为纹理
- Processing of GPU textures on the CPU side在CPU端处理GPU纹理
最新更新:
2021-04-29
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)