LiDAR Demo
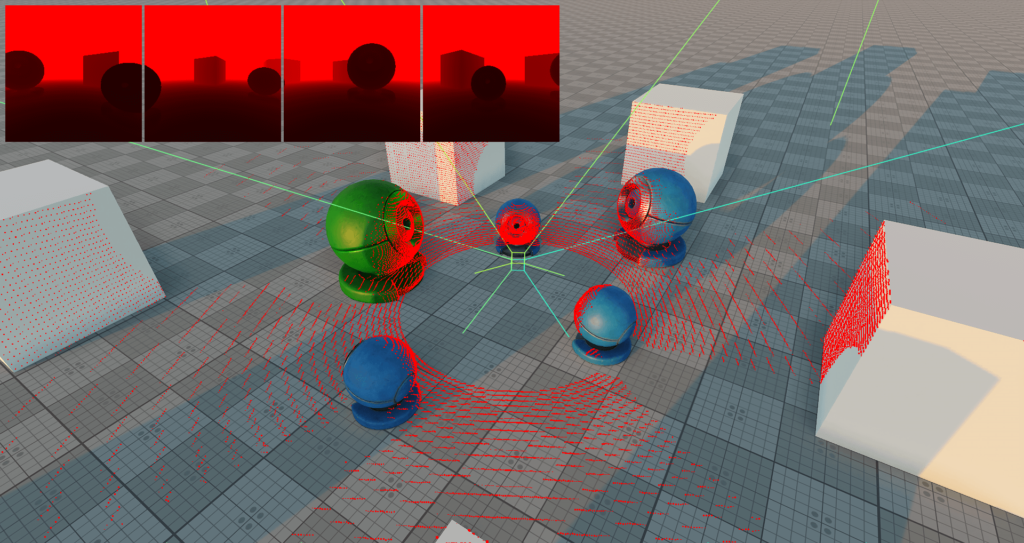
 LiDAR是一种用于机器人吸尘器,无人机,自动驾驶汽车等中的方法,用于对周围环境进行光学扫描。该演示包含LiDAR仿真,可用于训练自动驾驶仪和AI。使用深度缓冲区可实现快速准确的扫描程序。您可以通过API配置LiDAR(设置所需的范围,FOV,分辨率和其他参数)。
LiDAR是一种用于机器人吸尘器,无人机,自动驾驶汽车等中的方法,用于对周围环境进行光学扫描。该演示包含LiDAR仿真,可用于训练自动驾驶仪和AI。使用深度缓冲区可实现快速准确的扫描程序。您可以通过API配置LiDAR(设置所需的范围,FOV,分辨率和其他参数)。
特征#
- 模拟LiDAR扫描器的可重用代码
- 从相机渲染为纹理
- 在CPU端处理GPU纹理
访问演示项目源代码#
您可以学习和修改此演示的源代码来创建自己的项目。 要访问源代码,请执行以下操作:
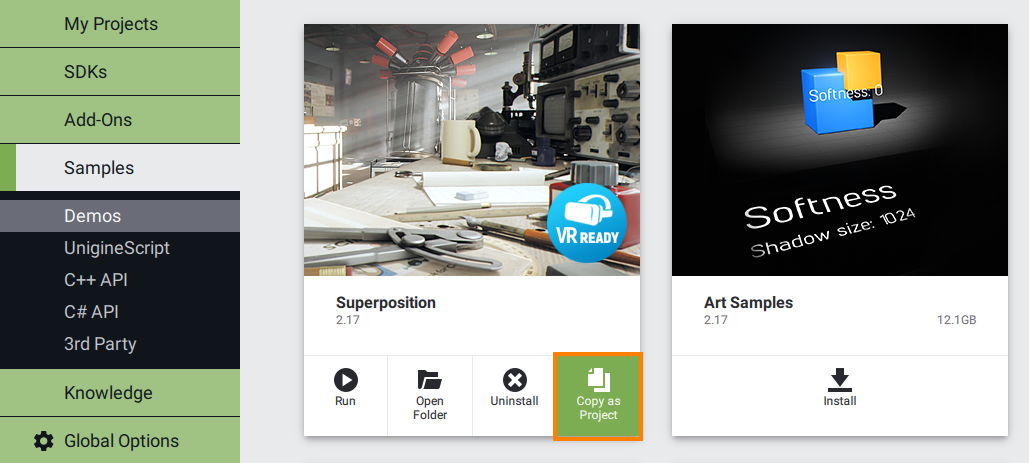
- 在Available部分中找到LiDAR Demo演示并点击Install(安装)(如果您尚未安装)。
- 安装成功后,demo会出现在Installed部分,您可以点击Copy as Project基于此创建项目 演示。
- 在打开的 Create New Project 窗口中,在相应字段中输入新项目的名称,然后单击Create New Project.
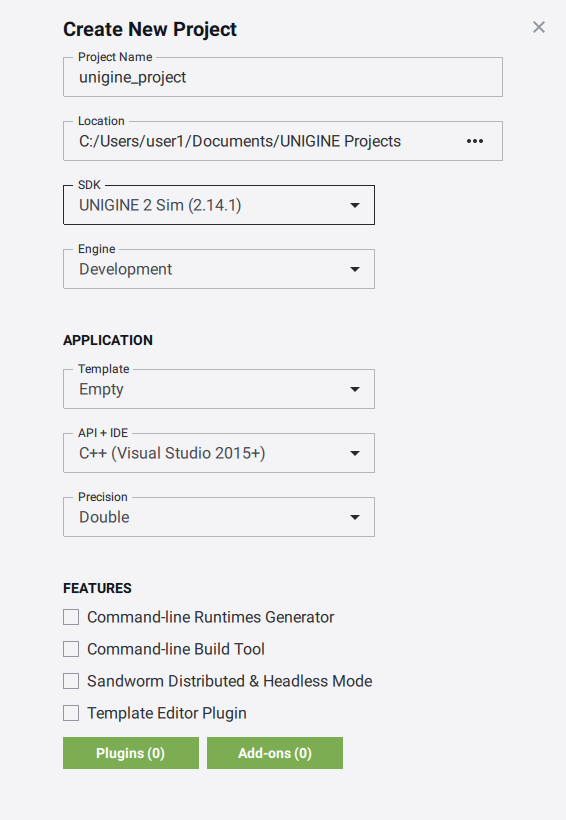
- 现在您可以点击Open Code IDE查看和修改默认IDE中的源代码,或者点击Open Editor打开项目 在 UnigineEditor中。

最新更新:
2021-12-13
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)