LiDAR Demo
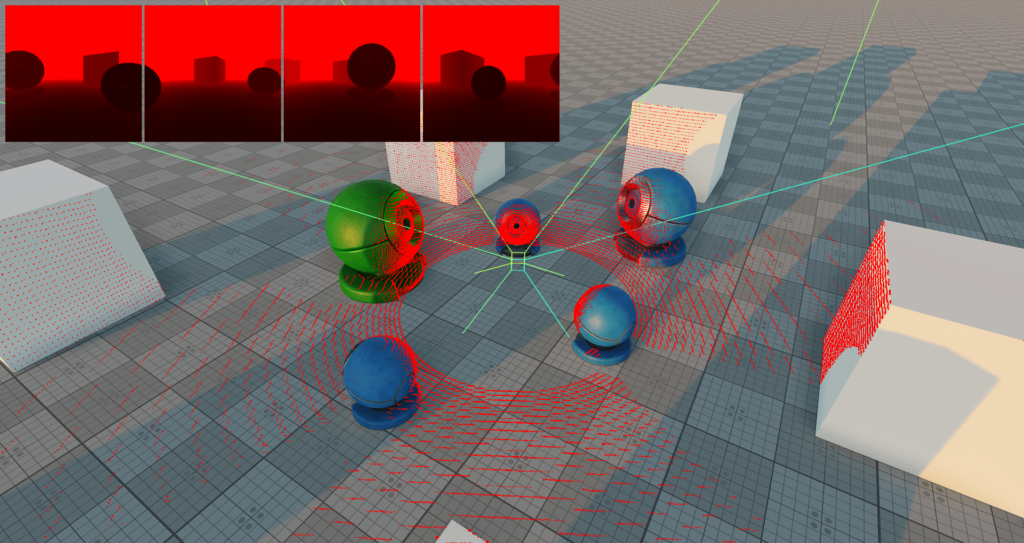
LiDAR is a method used in robot vacuum cleaners, drones, self-driving cars, etc. for optical scanning of surroundings. This demo contains the LiDAR emulation that can be used for training autopilots and AI. A quick and accurate scaner is implemented using the depth buffer. You can configure your LiDAR (set the desired range, FOV, resolution, and other parameters) via API.
Features#
- Reusable code emulating the LiDAR scanner
- Rendering from cameras into textures
- Processing of GPU textures on the CPU side
Accessing Demo Source Code#
You can study and modify the source code of this demo to create your own projects. To access the source code do the following:
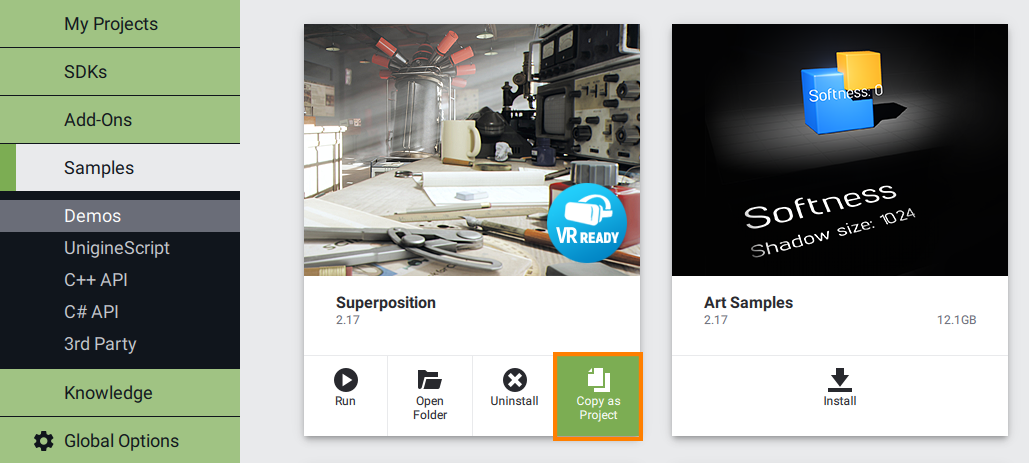
- Find the LiDAR Demo demo in the Available section and click Install (if you haven't installed it yet).
- After successful installation the demo will appear in the Installed section, and you can click Copy as Project to create a project based on this demo.
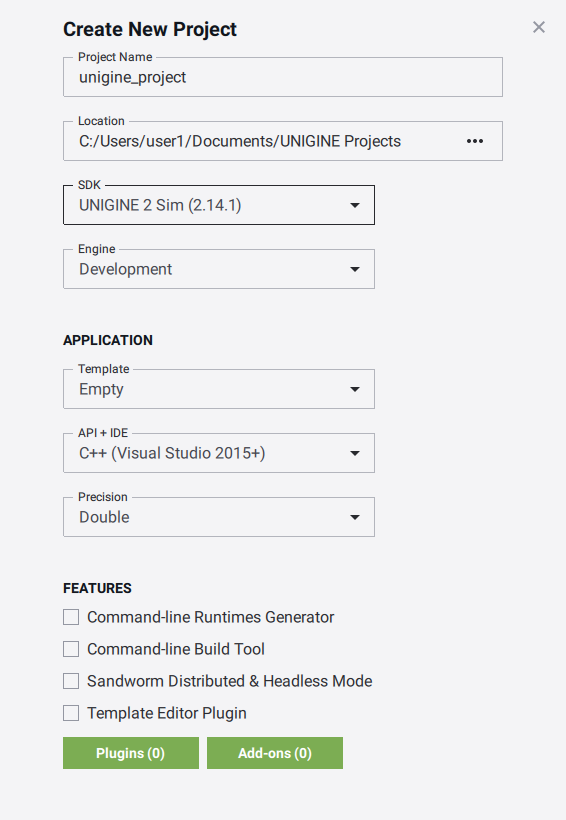
- In the Create New Project window, that opens, enter the name for your new project in the corresponding field and click Create New Project.
- Now you can click Open Code IDE to check and modify source code in your default IDE, or click Open Editor to open the project in the UnigineEditor.

Last update:
2021-12-13
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)