Render
 ComputeShaderComputeShader#
ComputeShaderComputeShader#
Creating a compute shader to process a million of particles.创建一个计算着色器来处理一百万个粒子。
ComputeShaderImageComputeShaderImage#
Creating a compute shader that processes a read-write texture on GPU (without CPU).创建一个计算着色器处理一个读写纹理在GPU(没有CPU)。
FfpDepthFfpDepth#
Demonstration of how to draw visualizer elements taking the depth buffer into account.演示如何在考虑深度缓冲区的情况下绘制可视化器元素。
GBufferReadGBufferRead#
Demonstration of how to access GBuffer textures during the rendering process.演示如何访问GBuffer纹理渲染过程中。
GBufferWriteGBufferWrite#
Demonstration of how to modify GBuffer textures during the rendering process.演示如何在渲染过程中修改GBuffer纹理。
RenderTargetRenderTarget#
Rendering to a texture by using the RenderTarget class.使用RenderTarget类渲染纹理。
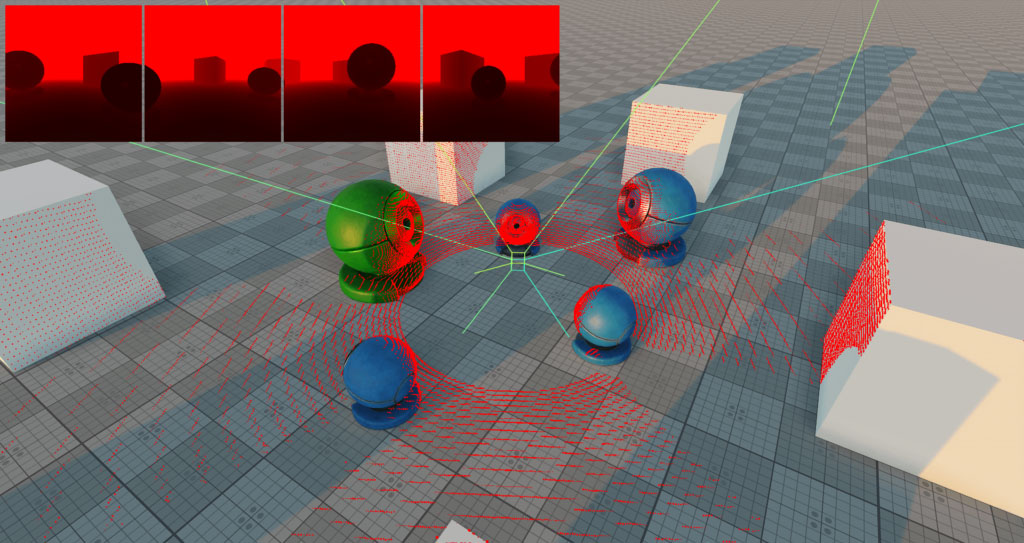
LiDARLiDAR#
LiDAR is a method used in robot vacuum cleaners, drones, self-driving cars, etc. for optical scanning of surroundings. This sample contains the LiDAR emulation that can be used for training autopilots and AI. A quick and accurate scaner is implemented using the depth buffer. You can configure your LiDAR (set the desired range, FOV, resolution, and other parameters) via API.LiDAR方法用于机器人真空吸尘器,光学扫描的无人机,无人驾驶汽车等环境。这个示例包含LiDAR仿真可用于培训蒙和人工智能。实现快速而准确的扫描仪使用深度缓冲。您可以配置您的LiDAR(设置所需的范围、视场、决议和其他参数)通过API。
OffscreenOffscreen#
Running in the background mode, the sample demonstrates graphics context creation, screenshots are periodically saved to the saved_image folder (DirectX only).在后台模式下运行的示例演示了图形上下文的创建,屏幕截图定期保存到saved_image文件夹(仅限DirectX)。
ScreenshotScreenshot#
Grabbing a final image from the rendering sequence.抓住最后一个图像的呈现顺序。
StructuredBufferStructuredBuffer#
Creating a simple DXT compression by using structured buffers.通过使用结构化缓冲区创建一个简单的DXT压缩。
TexturesTextures#
Creating a plugin for changing textures on meshes.创建一个插件来改变网格上的纹理。