Obstacle Box
An obstacle box is a cuboid-shaped obstacle that is detected and bypassed by other objects during pathfinding. The obstacle box can be added, for example:
- For the cuboid-shaped nodes (buildings, old-fashioned cars, fences and so on) that are placed inside a navigation area and should be bypassed.
- For the areas (rivers, swimming pools and so on) that should be bypassed.
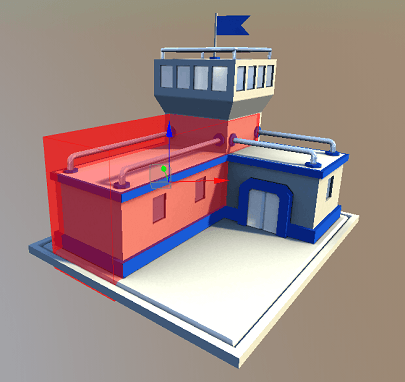
An obstacle box and a building
See also
- The ObstacleBox class to edit box obstacles via UnigineScript
- The PathRoute class to create 2D and 3D routes among obstacles
- The article on Creating Routes
- A set of articles on Navigation Areas
- A set of samples located in the data/samples/paths folder:
- obstacle_00
- route_01
- route_02
Adding Obstacle Box
To add an obstacle box to the scene via UnigineEditor:
- Run UnigineEditor.
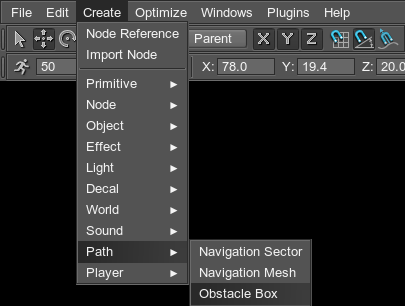
- On the Menu bar, click Create -> Path -> Obstacle Box.
- Click somewhere in the world to place the obstacle.
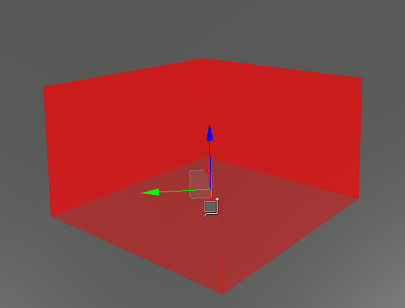
The new obstacle box will be added to UnigineEditor and you will be able to edit it via the Nodes panel. See also the example on obstacle box usage.
Editing Obstacle Box
On the Obstacle tab of the Nodes panel, you can adjust the following parameters of the obstacle box:
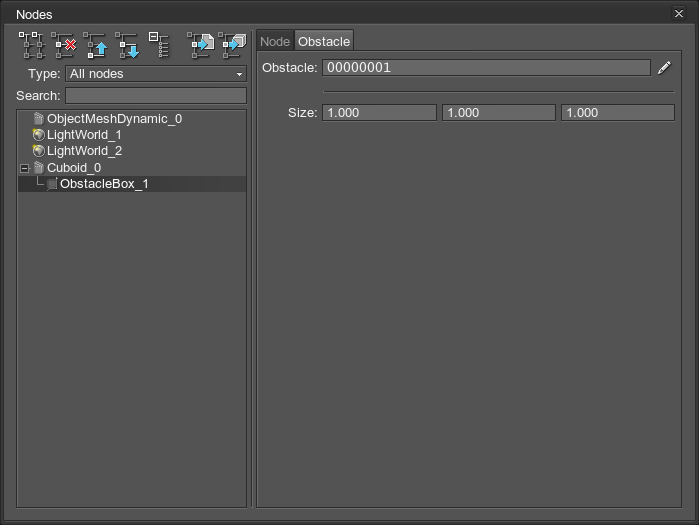
| Obstacle | Obstacle mask. The obstacle mask of the obstacle box must match the obstacle mask of the route that is calculated during pathfinding. Otherwise, the obstacle will not be taken into account during pathfinding. Also by using the obstacle mask, you can specify obstacle boxes that should be ignored during pathfinding. |
|---|---|
| Size | Size of the obstacle box along the axes in units. |
Last update: 2017-07-03
Help improve this article
Was this article helpful?
(or select a word/phrase and press Ctrl+Enter)