Mars Demo


Mars demo project recreates one million square kilometers of the Mars surface. You can drive the rover around the planet and view the Gale Crater using a 20x scopes support!
This demo showcases features of the Landscape Terrain system. No static meshes involved, only a terrain object.
Features#
- Highest geometry and texture detailing possible (up to 1 millimeter per pixel)
- 1000 x 1000 km area size
- 8 x 8 km high-detailed zone (0.25 m / pixel mask density, 1 mm / pixel for detailed 4K textures)
- Dynamic craters (100 x 100 x 25 m) that can be placed in real-time anywhere
- Rover tracks as another demonstration of real-time modification of terrain surface
- Up to 20x scopes
System Requirements#
To run this demo, the following is required:
Video memory: minimum 2 GB — this would allow running the demo with Low and Medium quality. With the memory less than this, the demo will not run.
- Low — 2048 MB
- Medium — 2048 MB
- High — 3072 MB
- Ultra — 4096 MB
- Disk space: 12 GB
We tested this with nVidia GeForce GTX 1080Ti, and it worked fine, so you can evaluate your possibilities based on this.
SDK Path: <SDK_INSTALLATION>demos\mars_2.20
Accessing Demo Source Code#
You can study and modify the source code of this demo to create your own projects. To access the source code do the following:
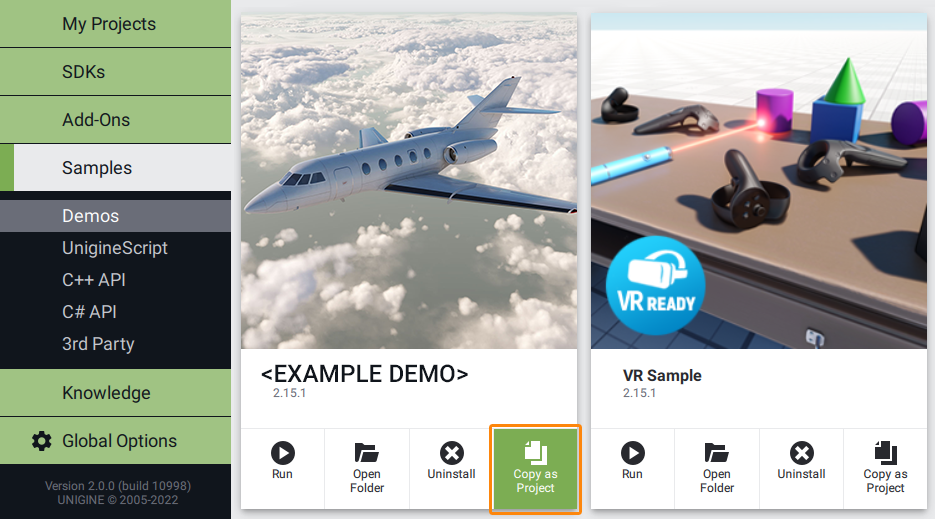
- Find the Mars Demo demo in the Demos section and click Install (if you haven't installed it yet).
- After successful installation the demo will appear in the Installed section, and you can click Copy as Project to create a project based on this demo.
- In the Create New Project window, that opens, enter the name for your new project in the corresponding field and click Create New Project.
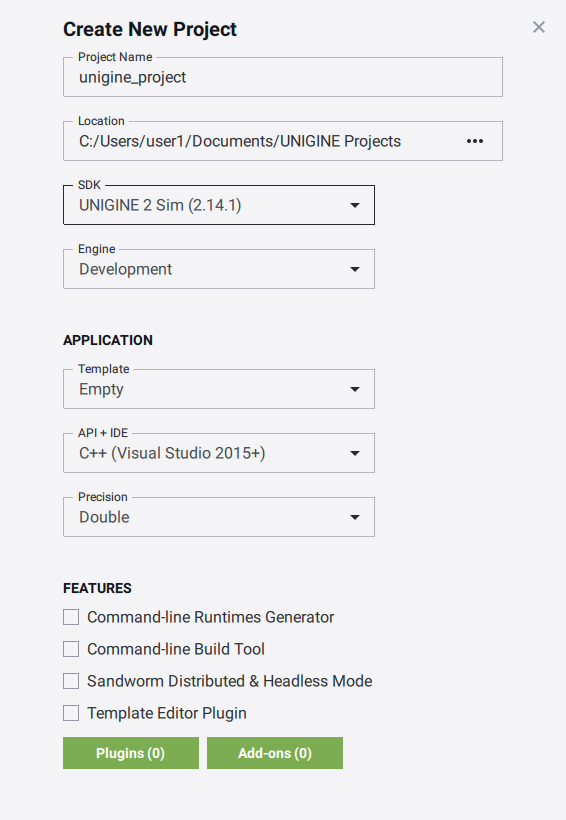
- Now you can click Open Code IDE to check and modify source code in your default IDE, or click Open Editor to open the project in the UnigineEditor.

The information on this page is valid for UNIGINE 2.20 SDK.