Unigine::JointSuspension Class
| Header: | #include <UniginePhysics.h> |
| Inherits: | Joint |
Warning
This joint type is deprecated and will be removed in the upcoming releases. It is recommended to use the Wheel Joint instead.
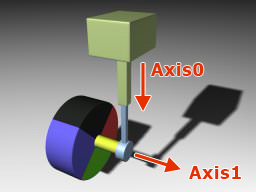
This class is used to create a suspension joint. The bodies that represent both a frame and a wheel must be rigid bodies.
Example#
The following code illustrates connection of two rigid bodies (frame and wheel) using a suspension joint.
Source code (UnigineScript)
include <UniginePhysics.h>
/* .. */
JointSuspensionPtr joint = JointSuspension::create(frame, wheel);
// setting joint anchor coordinates
joint->setWorldAnchor(wheel->getObject()->getWorldTransform() * Vec3(0.0f));
// setting joint axes coordinates
joint->setWorldAxis0(vec3(0.0f,0.0f,1.0f));
joint->setWorldAxis1(vec3(0.0f,1.0f,0.0f));
// setting linear damping and spring rigidity
joint->setLinearDamping(2.0f);
joint->setLinearSpring(200.0f);
// setting lower and upper suspension ride limits [-0.5; 0.0]
joint->setLinearLimitFrom(-0.5f);
joint->setLinearLimitTo(0.0f);
// setting target suspension height
joint->setLinearDistance(0.5f);
// setting maximum angular velocity and torque
joint->setAngularVelocity(-20.0f);
joint->setAngularTorque(10.0f);
// setting common joint constraint parameters
joint->setLinearRestitution(0.2f);
joint->setAngularRestitution(0.2f);
joint->setLinearSoftness(0.2f);
joint->setAngularSoftness(0.2f);
// setting number of iterations
joint->setNumIterations(8);See Also#
- A set of UnigineScript API samples located in the <UnigineSDK>/data/samples/physics/ folder:
- car_00
- car_01
- car_03
JointSuspension Class
Members
static JointSuspensionPtr create ( ) #
Constructor. Creates a suspension joint with an anchor at the origin of the world coordinates.static JointSuspensionPtr create ( const Ptr<Body> & body0, const Ptr<Body> & body1 ) #
Constructor. Creates a suspension joint connecting two given bodies. An anchor is placed between centers of mass of the bodies.Arguments
- const Ptr<Body> & body0 - Frame to be connected with the joint.
- const Ptr<Body> & body1 - Wheel to be connected with the joint.
static JointSuspensionPtr create ( const Ptr<Body> & body0, const Ptr<Body> & body1, const Math::Vec3 & anchor, const Math::vec3 & axis0, const Math::vec3 & axis1 ) #
Constructor. Creates a suspension joint connecting two given bodies with specified suspension and spindle axis coordinates and an anchor placed at specified coordinates.Arguments
- const Ptr<Body> & body0 - Frame to be connected with the joint.
- const Ptr<Body> & body1 - Wheel to be connected with the joint.
- const Math::Vec3 & anchor - Anchor coordinates.
- const Math::vec3 & axis0 - Suspension axis coordinates.
- const Math::vec3 & axis1 - Wheel spindle axis coordinates.
void setAngularDamping ( float damping ) #
Sets an angular damping of the joint (wheel rotation damping).Arguments
- float damping - Angular damping. If a negative value is provided, 0 will be used instead.
float getAngularDamping ( ) #
Returns the angular damping of the joint (wheel rotation damping).Return value
Angular damping.void setAngularTorque ( float torque ) #
Sets a maximum torque of the attached angular motor.Arguments
- float torque - Maximum torque. If a negative value is provided, 0 will be used instead.
float getAngularTorque ( ) #
Returns the maximum torque of the attached angular motor.Return value
Maximum torque.void setAngularVelocity ( float velocity ) #
Sets a maximum velocity of wheel rotation.Arguments
- float velocity - Velocity in radians per second.
float getAngularVelocity ( ) #
Returns the target velocity of wheel rotation.Return value
Target velocity in radians per second.void setAxis00 ( const Math::vec3 & axis00 ) #
Sets coordinates of suspension axis, along which a wheel moves vertically. This is a shock absorber.Arguments
- const Math::vec3 & axis00 - Suspension axis.
Math::vec3 getAxis00 ( ) #
Returns suspension axis coordinates.Return value
Suspension axis.void setAxis10 ( const Math::vec3 & axis10 ) #
Sets a wheel spindle axis in coordinates of the frame (body 0): an axis around which a wheel rotates when moving forward (or backward).
Arguments
- const Math::vec3 & axis10 - Wheel spindle axis in coordinates of the frame (body 0).
Math::vec3 getAxis10 ( ) #
Returns the wheel spindle axis in coordinates of the frame (body 0).
Return value
Wheel spindle axis in coordinates of the frame (body 0).void setAxis11 ( const Math::vec3 & axis11 ) #
Sets a wheel spindle axis in coordinates of the wheel (body 1): an axis around which a wheel rotates when steering.
Arguments
- const Math::vec3 & axis11 - Wheel spindle axis in coordinates of the wheel (body 1).
Math::vec3 getAxis11 ( ) #
Returns the wheel spindle in coordinates of the wheel (body 1).
Return value
Wheel spindle axis in coordinates of the wheel (body 1).float getCurrentAngularVelocity ( ) #
Returns the current velocity of wheel rotation.Return value
Current velocity in radians per second.float getCurrentLinearDistance ( ) #
Returns the current suspension compression.Return value
Current suspension height in units.void setLinearDamping ( float damping ) #
Sets a linear damping of the suspension.Arguments
- float damping - Linear damping. If a negative value is provided, 0 will be used instead.
float getLinearDamping ( ) #
Returns the linear damping of the suspension.Return value
Linear damping.void setLinearDistance ( float distance ) #
Sets a target height of the suspension.Arguments
- float distance - Height in units.
float getLinearDistance ( ) #
Returns the target height of the suspension.Return value
Target height in units.void setLinearLimitFrom ( float from ) #
Sets a low limit of the suspension ride.Arguments
- float from - Limit in units.
float getLinearLimitFrom ( ) #
Returns the low limit of the suspension ride.Return value
Low limit in units.void setLinearLimitTo ( float to ) #
Sets a high limit of the suspension ride.Arguments
- float to - Limit in units.
float getLinearLimitTo ( ) #
Returns the high limit of the suspension ride.Return value
High limit in units.void setLinearSpring ( float spring ) #
Sets a rigidity coefficient of the suspension.Arguments
- float spring - Rigidity coefficient. If a negative value is provided, 0 will be used instead.
float getLinearSpring ( ) #
Returns the rigidity coefficient of the suspension.Return value
Rigidity coefficient.void setWorldAxis0 ( const Math::vec3 & axis0 ) #
Sets suspension axis in the world coordinates.Arguments
- const Math::vec3 & axis0 - Suspension axis in the world coordinates.
Math::vec3 getWorldAxis0 ( ) #
Returns the suspension axis in the world coordinates.Return value
Suspension axis in the world coordinates.void setWorldAxis1 ( const Math::vec3 & axis1 ) #
Sets a wheel spindle axis in the world coordinates.Arguments
- const Math::vec3 & axis1 - Wheel spindle axis in the world coordinates.
Math::vec3 getWorldAxis1 ( ) #
Returns the wheel spindle axis in the world coordinates.Return value
Wheel spindle axis in the world coordinates.Last update:
31.07.2020
Помогите сделать статью лучше
Была ли эта статья полезной?
(или выберите слово/фразу и нажмите Ctrl+Enter