Creating 2D Routes within Navigation Area with Obstacles
The example guides you through the process of setting up a scene with a simple navigation area and calculating a 2D route within it.
Preparing Scene#
Before calculating routes, we should create a navigation area within which this logic will be executed. Our navigation area will be represented by a single navigation sector with obstacles. Also, we will add some auxiliary nodes that will serve as the start and destination points of the route.
- Create an empty project via SDK Browser.
- Open it in UnigineEditor and remove the unnecessary default nodes.
-
In the Menu bar, choose Create -> Navigation -> Navigation Sector and place the node above the plane.
NoticeTo facilitate working with the navigation sectors, activate gizmos for Navigation nodes in the Helpers Panel.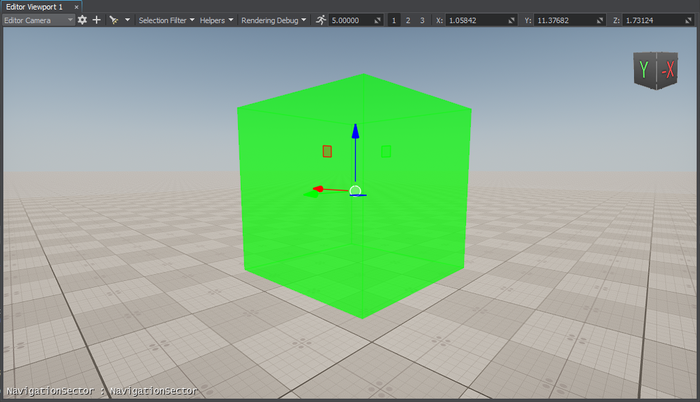
-
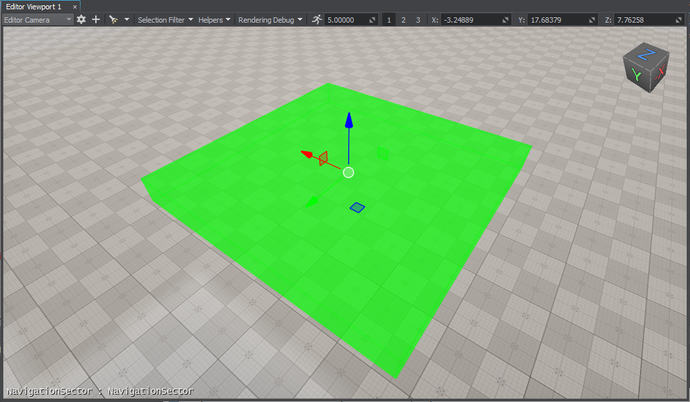
Adjust the Size of the sector in the Parameters window.

-
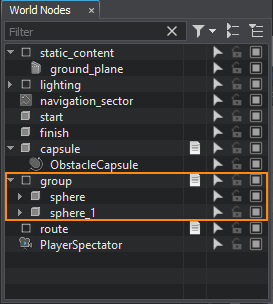
Add 2 nodes that will be used as the start and destination points of the route. We will create 2 boxes (Create -> Primitives -> Box), rename them start and finish, and place inside the navigation sector as pictured below.
-
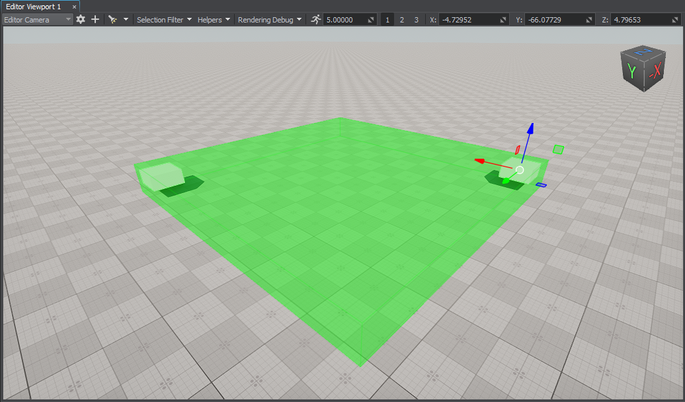
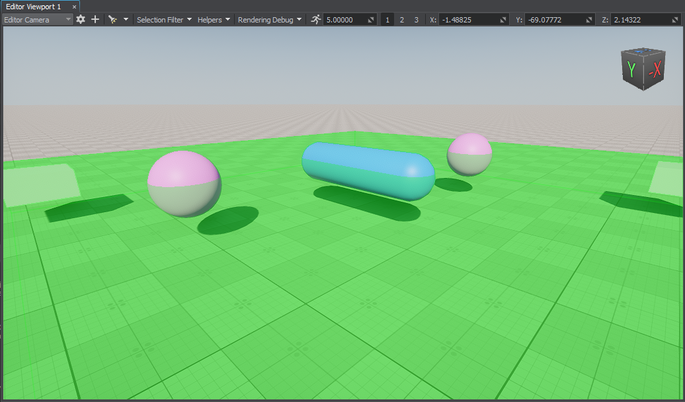
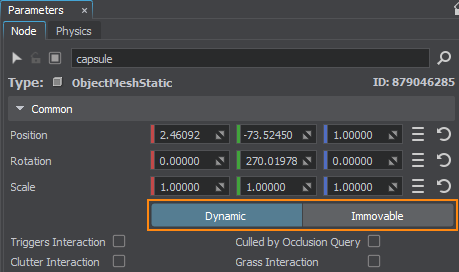
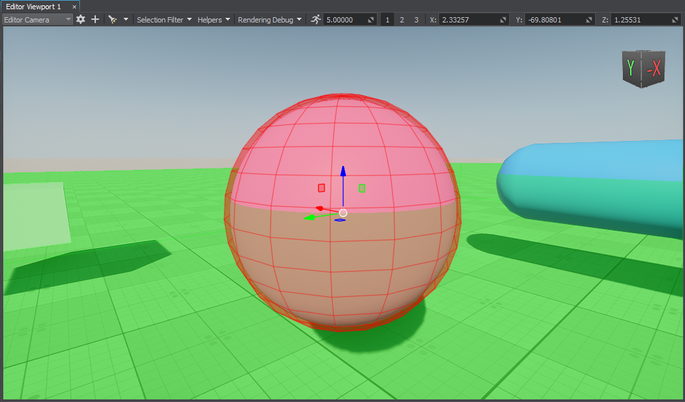
Create several primitives and place them inside the navigation area. We will add a capsule and two boxes.
-
Make them dynamic: switch from Immovable to Dynamic in the Parameters window.
-
For each primitive, create an obstacle of the required type: in the World Hierarchy window, right-click the primitive, choose Create -> Navigation, and select the obstacle. The created obstacle will be added as a child to the primitive node in the hierarchy.
NoticeIt will allow you to change the node and obstacle transformations at the same time without any extra configuration.
-
Adjust the size of the created obstacles in the Parameters window if necessary.
Creating Component for Route Calculation#
The created navigation sector only provides the area within which routes are calculated. The routes themselves must be created from the code. So, let's create the corresponding C++ component for 2D route calculation.
Add a new Route2D class inherited from the ComponentBase class (the *.h and *.cpp files) to the project. The class name will be used as the property name.
Implementing Component Logic#
-
In the Route2D.h file, declare a component class, parameters and a route:
- Two parameters that will accept nodes between which a route should be calculated.
- Route color.
Source code (C++)#pragma once #include <UnigineComponentSystem.h> #include <UniginePathFinding.h> using namespace Unigine; using namespace Math; // derive the component from the ComponentBase class class Route2D : public ComponentBase { public: // declare constructor and destructor and define a property name. The Route2D.prop file containing all parameters listed below will be saved in your project's data folder COMPONENT_DEFINE(Route2D, ComponentBase); // declare methods to be called at the corresponding stages of the execution sequence COMPONENT_INIT(init); COMPONENT_UPDATE(update); COMPONENT_SHUTDOWN(shutdown); // declare parameters of the component PROP_PARAM(Node, startPoint, NULL); PROP_PARAM(Node, finishPoint, NULL); PROP_PARAM(Color, routeColor, vec4_zero); void init(); void update(); void shutdown(); private: // declare a route PathRoutePtr route; }; -
In the Route2D.cpp file, register the component.
Source code (C++)#include "Route2D.h" REGISTER_COMPONENT(Route2D); -
Create a route and set the radius and height for the point which will move along the route in the init() method. Before creation, check if the nodes to be used as the start and finish points are specified.
Source code (C++)#include "Route2D.h" #include <UnigineNode.h> #include <UnigineConsole.h> #include <UnigineVisualizer.h> #include <UnigineLog.h> REGISTER_COMPONENT(Route2D); void Route2D::init() { // check if the start and destination nodes are correctly specified via the component interface if (startPoint && finishPoint) { // create a new route route = PathRoute::create(); // set a radius and height for the point which will move along the route route->setRadius(0.1f); route->setHeight(0.1f); } } -
To enable displaying the calculated route at run time, turn on the Visualizer. Additionally, you can output console messages to the application screen. Add the following logic to the init() function:
Source code (C++)Console::setOnscreen(true); Visualizer::setEnabled(true); -
In the update() function, calculate the route from the start to destination node:
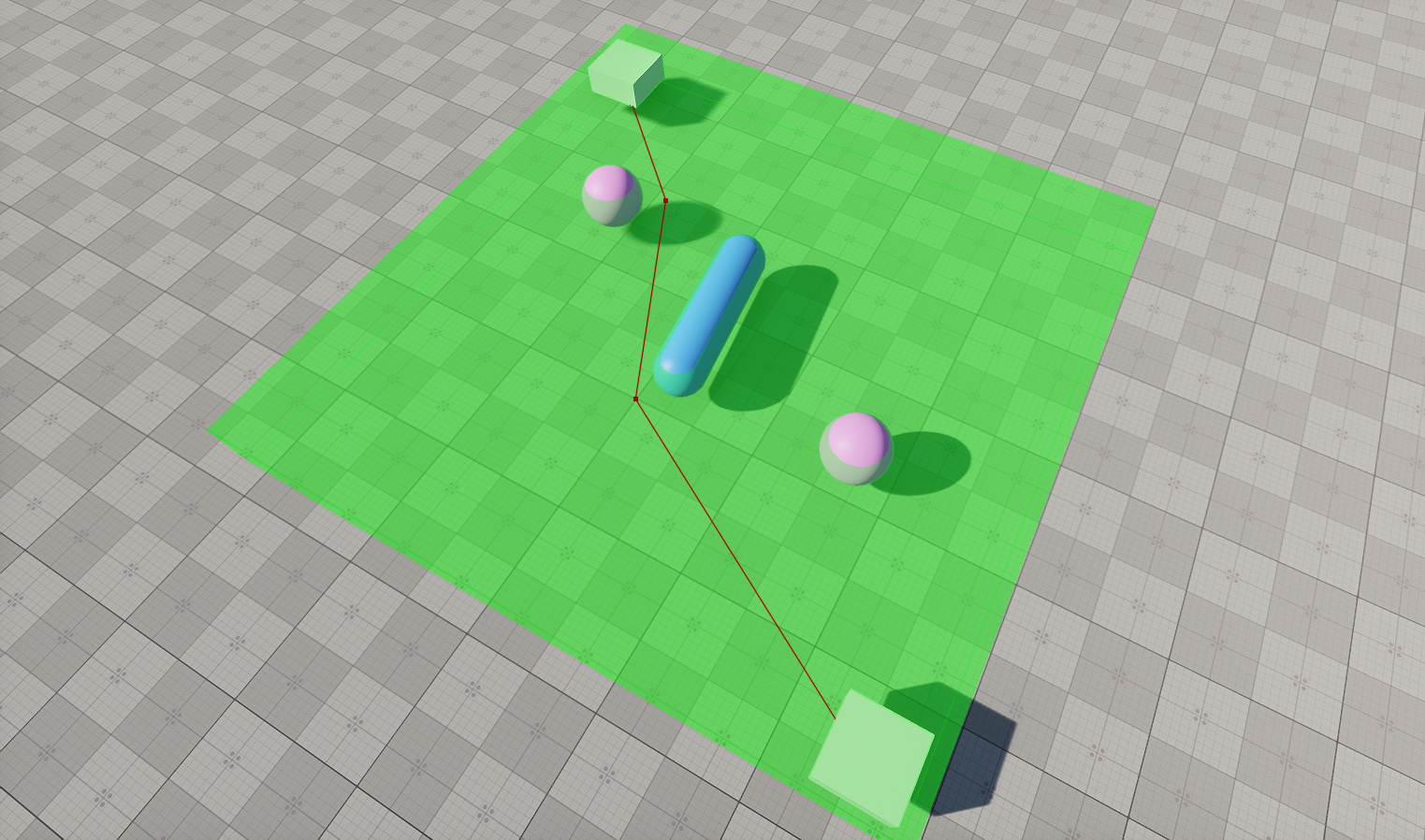
Source code (C++)void Route2D::update() { if (startPoint && finishPoint) { route->create2D(startPoint->getWorldPosition(), finishPoint->getWorldPosition()); if (route->isReached()) { // if the destination point is reached, render the root in a specified color route->renderVisualizer(routeColor); } else Log::message("PathRoute not reached yet\n"); } }NoticeHere the route is recalculated each frame. However, it is not optimal for application performance. Instead, you can calculate the route once per several frames: pass a delay to the create2D() function as the third argument. -
Implement the shutdown() function to disable the Visualizer and onscreen console messages:
Source code (C++)void Route2D::shutdown() { Console::setOnscreen(false); Visualizer::setEnabled(false); } -
The component is registered automatically by the Component System upon its initialization. However, you should add the following to the AppSystemLogic::init() method:
Source code (C++)#include "AppSystemLogic.h" #include <UnigineComponentSystem.h> int AppSystemLogic::init() { // initialize ComponentSystem and register all components Unigine::ComponentSystem::get()->initialize(); return 1; } - Build the project and run it once to generate the property for the Route2D component. It will be located in the data/ComponentSystem folder.
Here is the full code of the component:
#pragma once
#include <UnigineComponentSystem.h>
#include <UniginePathFinding.h>
using namespace Unigine;
using namespace Math;
// derive the component from the ComponentBase class
class Route2D : public ComponentBase
{
public:
// declare constructor and destructor and define a property name. The Route2D.prop file containing all parameters listed below will be saved in your project's data folder
COMPONENT_DEFINE(Route2D, ComponentBase);
// declare methods to be called at the corresponding stages of the execution sequence
COMPONENT_INIT(init);
COMPONENT_UPDATE(update);
COMPONENT_SHUTDOWN(shutdown);
// declare parameters of the component
PROP_PARAM(Node, startPoint, NULL);
PROP_PARAM(Node, finishPoint, NULL);
PROP_PARAM(Color, routeColor, vec4_zero);
void init();
void update();
void shutdown();
private:
// declare a route
PathRoutePtr route;
};#include "Route2D.h"
#include <UnigineNode.h>
#include <UnigineConsole.h>
#include <UnigineVisualizer.h>
#include <UnigineLog.h>
REGISTER_COMPONENT(Route2D);
void Route2D::init() {
// check if the start and destination nodes are correctly specified via the component interface
if (startPoint && finishPoint)
{
// create a new route
route = PathRoute::create();
// set a radius and height for the point which will move along the route
route->setRadius(0.1f);
route->setHeight(0.1f);
Console::setOnscreen(true);
Visualizer::setEnabled(true);
}
}
void Route2D::update() {
if (startPoint && finishPoint)
{
route->create2D(startPoint->getWorldPosition(), finishPoint->getWorldPosition());
if (route->isReached())
{
// if the destination point is reached, render the root in a specified color
route->renderVisualizer(routeColor);
}
else
Log::message("PathRoute not reached yet\n");
}
}
void Route2D::shutdown() {
Console::setOnscreen(false);
Visualizer::setEnabled(false);
}Assigning Component#
When the component logic is implemented and the property is generated, you should assign it to a node.
- In UnigineEditor, select Create -> Node -> Dummy and place it in the navigation area.
- Select the dummy node and assign the Route2D property to it in the Parameters window.
-
In the component parameters, specify the start and finish static meshes in the Start Point and Finish Point fields.
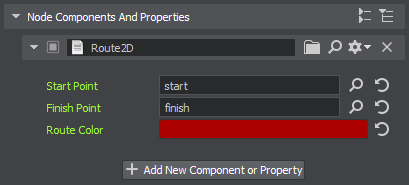
- Change the Route Color, if necessary.
Making Obstacles Move Dynamically#
Let's add a bit of complexity to the logic and make the nodes that are used as obstacles dynamically change.
- Add a new NodeRotator class inherited from the ComponentBase class (the *.h and *.cpp files) to the project.
-
Implement rotation logic:
Source code (C++)#include <UnigineComponentSystem.h> using namespace Unigine; using namespace Math; class NodeRotator : public ComponentBase { public: COMPONENT_DEFINE(NodeRotator, ComponentBase); COMPONENT_UPDATE(update); // declare a parameter of the component PROP_PARAM(Vec3, angularVelocity, vec3_zero); void update(); };Source code (C++)#include "NodeRotator.h" #include <UnigineGame.h> REGISTER_COMPONENT(NodeRotator); void NodeRotator::update() { // calculate the delta of rotation vec3 delta = angularVelocity * Game::getIFps(); // update node rotation node->setRotation(node->getRotation() * quat(delta.x, delta.y, delta.z)); } - Build the project and run it once again to generate the property for the NodeRotator component.
-
Assign the component to the capsule primitive that should rotate and specify the Angular Velocity:
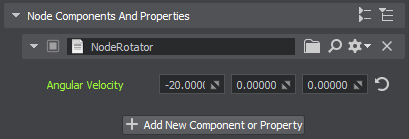
The obstacle will rotate as well.
-
Group the sphere primitives and assign the component to the parent dummy node. It will make the spheres rotate around this parent node (as in the case of a sphere, rotation around its own axis won't affect the route calculation).
Visualizing Navigation Area#
To clearly show how the path is built inside the navigation area, let's implement the AreaVisualizer component that enables displaying the navigation area gizmo at run time:
- Add a new AreaVisualizer class inherited from the ComponentBase class (the *.h and *.cpp files) to the project.
-
Implement the logic:
Source code (C++)#pragma once #include <UnigineComponentSystem.h> #include <UniginePathFinding.h> using namespace Unigine; class AreaVisualizer : public ComponentBase { public: COMPONENT_DEFINE(AreaVisualizer, ComponentBase); COMPONENT_UPDATE(update); void update(); };Source code (C++)#include "AreaVisualizer.h" #include <UnigineVisualizer.h> REGISTER_COMPONENT(AreaVisualizer); void AreaVisualizer::update() { // display the navigation area gizmo node->renderVisualizer(); } - Build the project and run it once again to generate the property for the AreaVisualizer component.
- Assign the component to the navigation sector.
Trying Out#
The information on this page is valid for UNIGINE 2.19.1 SDK.