Unigine::Plugins::IG::CollisionSegment Class
You should upgrade to
| Header: | #include <plugins/UnigineIG.h> |
This class is used to manage collision segments that are assigned to entities and used for collision detection.
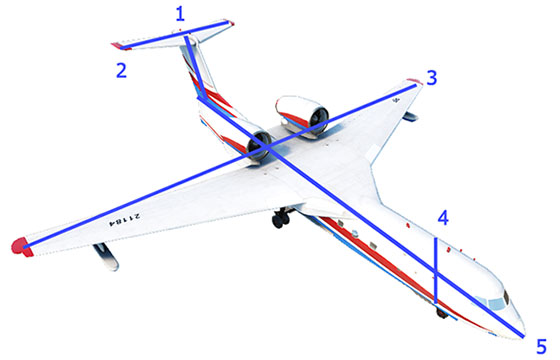
A collision detection segment is a line segment along which collision testing is performed by the IG. When a collision detection segment intersects a polygon, the IG registers a collision by sending the corresponding notification.
The segment is defined by specifying the locations of its endpoints with respect to the associated entity’s body coordinate system. Figure below illustrates five segments defined for an aircraft.
Collision detection volumes are tested segment-to-polygon. An entity will not perform collision detection segment testing against its own geometry.
If an entity is destroyed, all collision detection segments defined for that entity will also be destroyed.
CollisionSegment Class
Members
int getID ( ) const#
Returns the ID of the collision segment.Return value
Collision segment ID.Entity * getEntity ( ) const#
Returns the entity to which the collision segment is assigned.Return value
Entity to which the collision segment is assigned.bool isEnable ( ) const#
Returns a value indicating if the collision segment is enabled.Return value
true if the collision segment is enabled; otherwise, falsevoid setEnable ( bool value ) #
Enables or disables the collision segment.Arguments
- bool value - true to enable the collision segment; false - to disable it.
void setStartPoint ( const vec3 & point ) #
Sets the coordinates of the start point of the collision segment.Arguments
- const vec3 & point - Coordinates of the start point of the collision segment, in the coordinate system of the entity.
const vec3 & getStartPoint ( ) const#
Returns the current coordinates of the start point of the collision segment.Return value
Coordinates of the start point of the collision segment, in the coordinate system of the entity.void setEndPoint ( const vec3 & point ) #
Sets the coordinates of the end point of the collision segment.Arguments
- const vec3 & point - Coordinates of the end point of the collision segment, in the coordinate system of the entity.
const vec3 & getEndPoint ( ) const#
Returns the current coordinates of the end point of the collision segment.void setMaterialMask ( int mask ) #
Sets the material mask for the collision segment. This parameter specifies the environmental and cultural features to be included in or excluded from consideration for collision testing.Arguments
- int mask - Integer representing a bit mask, each bit of which represents a range of material code values. Setting that bit to 1 will cause the IG to register hits with materials within the corresponding range.
int getMaterialMask ( ) const#
Gets the material mask for the collision segment. This parameter specifies the environmental and cultural features to be included in or excluded from consideration for collision testing.Return value
Integer representing a bit mask, each bit of which represents a range of material code values. Setting that bit to 1 will cause the IG to register hits with materials within the corresponding range.void setCollisionDetectedCallback ( Unigine::CallbackBase * func ) #
Sets a callback on detecting a collision with the collision segment. This function can be used to define specific actions to be performed when a collision with the segment is detected. The signature of the callback function is as follows:void(CollisionSegment *segment , ObjectPtr object, WorldIntersectionPtr wi)
/// callback function to be called when a collision with the collision segment is detected
void my_callback(CollisionSegment *segment , ObjectPtr object, WorldIntersectionPtr wi)
{
// your code
}
// ...
// somewhere in code
void SomeClass::init()
{
// adding "my_callback" to be called when a collision with the segment is detected
ig_manager->getEntity(entity_id)->getCollisionSegment(segment_id)->setCollisionDetectedCallback(Unigine::MakeCallback( my_callback );
}Arguments
- Unigine::CallbackBase * func - Callback pointer.